Motorbesturingscircuits als functie van snelheid
 Bij motorbesturing wordt het toerental bewaakt als functie van het toerental van de motorrotor om de overeenkomstige regelelementen te beïnvloeden wanneer deze veranderen.
Bij motorbesturing wordt het toerental bewaakt als functie van het toerental van de motorrotor om de overeenkomstige regelelementen te beïnvloeden wanneer deze veranderen.
Snelheidsregelrelais of kleine elektrische meetgeneratoren kunnen worden gebruikt in regelcircuits voor het starten van motoren. Ze worden echter uiterst zelden voor deze doeleinden gebruikt vanwege de complexiteit van het ontwerp, de hoge kosten en onvoldoende betrouwbaarheid. Daarom wordt het motortoerental geregeld via indirecte methoden. In asynchrone en synchrone motoren wordt de rotatiefrequentie geregeld door de emf en frequentie van de rotorstroom, en in gelijkstroommotoren door de anker-emf.
In afb. 1, a en b tonen schema's voor het automatisch starten van een parallel bekrachtigde gelijkstroommotor, afhankelijk van de rotatiefrequentie en afhankelijk van de EMF en de ankerspanning vanaf het moment van starten. De regeling van de rotatiefrequentie wordt uitgevoerd door de EMF van de motor te meten, die varieert in verhouding tot de rotatiefrequentie.
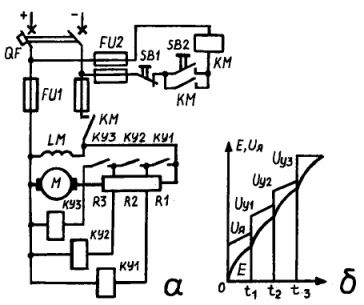
Rijst. 1.Regelcircuits als functie van snelheid: a en b - schakel- en startschema van een parallel bekrachtigde gelijkstroommotor
Aangezien de EMF evenredig is met het motortoerental, wordt de automatische invoer van afzonderlijke trappen van de startreostaat uitgevoerd bij een bepaalde grootte van de bedieningsspanning van de versnellingsschakelaars KM1, KM2 en KMZ, die elk op een bepaalde terugtrekking zijn ingesteld waarde. Door op de starter te drukken toetsen SB2 schakelt de KM-lijnmagneetschakelaar in. Alle weerstanden R1, R2, R3 worden in serie geschakeld met de ankerwikkeling en beperken de stroom.
Bij een bepaalde snelheid n1 is de spanning Uy1 van de spoel van de schakelaar K1

waar Hier Dit is de coëfficiënt van de machine.
Wanneer Uy1 gelijk is aan de pull-down spanning, zal de contactor KM1 werken en de weerstand R1 kortsluiten. Een verdere toename van de rotatiesnelheid tot de rotatie van n2 en n3 zal leiden tot een toename van de spanning op de spoelen van de schakelaars K2 en een kortsluiting naar waarden


In dit geval zullen de schakelaars K2 en de kortsluiting in serie werken en de weerstanden R2 en R3 kortsluiten. Na het kortsluiten van weerstand R3 is het startproces voltooid en kan de motor lange tijd draaien.
De EMF in het rotorcircuit van de inductiemotor is evenredig met de slip, d.w.z. E2s = E2s. Hier is E2 de emf van een stationaire rotor.
Hoe lager de slip, hoe lager de EMF, dat wil zeggen hoe hoger de motorrotorsnelheid. Om het starten van AC-motoren met een gewikkelde rotor te regelen, worden relais gebruikt die de waarde van EMF in het rotorcircuit regelen.De bijbehorende apparaten (relais, magneetschakelaars) die de startweerstanden kortsluiten, worden aangepast aan deze spanningen.
Voor de besturing van inductiemotoren met gewikkelde rotor en synchrone motoren kan de frequentiemethode ook worden gebruikt als functie van de snelheid. Deze methode is gebaseerd op de bekende afhankelijkheid van de frequentie van de rotorstroom f2 van de rotatiefrequentie van het statorveld n0 en de rotor n2, d.w.z.
Aangezien elke rotorsnelheid overeenkomt met een bepaalde f2-waarde, zal een relais dat op die frequentie is ingesteld en is aangesloten op het motorrotorcircuit, inwerken op het contactorspoelcircuit. De schakelaar zal bij een bepaalde snelheid de weerstandstrappen kortsluiten.
Remmen door tegengestelde motoren gebeurt afhankelijk van de snelheid snelheidsregeling relais SR. In figuur 2 tonen a, b voorbeelden van het stoppen van asynchrone motoren door tegenwerking.
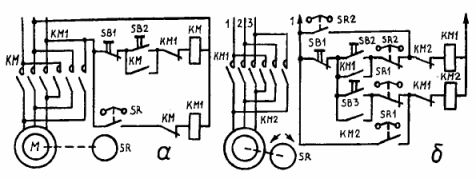
Rijst. 2. Regelingen voor het stoppen van asynchrone motoren door middel van oppositie: a — niet-omkeerbaar; b - omkeerbaar
Laten we eens kijken hoe deze schema's werken.
Door op de SB2-knop te drukken, wordt de spoel van de contactor KM ingeschakeld (zie Fig. 2, a), die de vermogenscontacten sluit en de SB2-knop blokkeert. Tegelijkertijd verbreekt het contact van het openingsblok KM in het circuit van de spoel van de remmagneetschakelaar KM1 en het snelheidsregelingsrelais SR ze van het netwerk. Wanneer de motorrotor een bepaalde snelheid bereikt, zal het SR-contact sluiten, maar hierdoor zal de KM1-magneetschakelaar niet meer werken. De motor blijft normaal draaien.
Het stoppen van de motor met een tegenschakelrem gebeurt door op de SB-knop te drukken.Tegelijkertijd wordt de spoel van de contactor KM geneutraliseerd en verdwijnen de hoofdcontacten en wordt de motor losgekoppeld van het netwerk. Het KM-openingscontact in het remmagneetschakelaarcircuit van KM1 zal sluiten. Aangezien op dit moment het contact van het snelheidsregelrelais SR is gesloten, worden de hoofdcontacten van de remmagneetschakelaar onmiddellijk ingeschakeld en wordt de statorwikkeling in de omgekeerde richting geschakeld, het magnetische veld begint in de tegenovergestelde richting te draaien, d.w.z. de rotatie van de rotor en de motor wordt gestopt door tegenschakeling. De snelheid van de rotor neemt af en bij een bepaalde kleine waarde zullen de contacten van het RKS-snelheidsregelrelais openen en de motor loskoppelen van het net.
In het geval van omgekeerde besturing met tegengesteld remmen (Fig. 2, b), wordt de motor vooruit gestart door op de knop SB1 te drukken, die, door het circuit van de spoel van de schakelaar KM1 te sluiten, ervoor zorgt dat de motor is aangesloten op de netwerk. De motorrotor begint te draaien en wanneer hij een bepaalde snelheid bereikt, zal het sluitcontact SR1 van het snelheidsregelrelais sluiten en het openingscontact SR2 openen.
Het inschakelen van de spoel van de schakelaar KM2 gebeurt niet omdat het openingscontact van de schakelaar KM1 zijn circuit heeft verbroken. In deze stand blijft de motor draaien totdat de SB-knop wordt ingedrukt. Wanneer de SB-knop wordt ingedrukt, wordt het circuit van de spoel KM1 uitgeschakeld. Hierdoor wordt het verbreekcontact KM1 gesloten en krijgt het spoelcircuit van de contactor KM2 stroom.
De wikkeling van de motorstator wordt ingeschakeld om om te keren. Terwijl de rotor door traagheid in dezelfde richting blijft draaien, treedt oppositieremmen op.Wanneer de snelheid afneemt tot een bepaalde kleine waarde, opent het snelheidsregelrelais zijn contact SR1, schakelt de schakelaar KM2 uit en koppelt de motor los van het netwerk.
Om de motor achteruit te starten, drukt u op de SB2-knop. Het hele proces zal vergelijkbaar zijn met het beschreven proces. Nu wordt de rol van de remmagneetschakelaar gespeeld door de KM1-magneetschakelaar en de SR2-contacten van het snelheidsregelrelais regelen het remproces.
Het automatisch starten van een synchrone motor gaat gepaard met bekende problemen, omdat het in dit geval niet alleen nodig is om de startstroom te beperken, maar ook om de machine met het netwerk te synchroniseren.
Het regelcircuit voor een synchrone motor met laag vermogen wordt getoond in Fig. 3. Inschakelstroombegrenzing wordt geleverd door actieve weerstanden in de statorwikkeling. Voordat u de motor start, schakelt u de automatische ingangsschakelaars QF en QF1 van het AC- en DC-net in, die maximale en thermische bescherming bieden. Door op de startknop SB2 te drukken, wordt de spoel van de contactor KM ingeschakeld en wordt de statorwikkeling van de synchrone motor via de hoofdcontacten van KM verbonden met het netwerk via de startweerstanden Rn. De spoel is zelfremmend en het contact in het DC-circuit omvat het vergrendelingsrelais KV, waarvan het sluitcontact, sluitend, de spoelen van de schakelaars K1 en K2 voorbereidt op inschakelen.
De frequentierelais KF1 en KF2 in het bekrachtigingscircuit van de LM-rotor werken afhankelijk van het motortoerental.Bij het opstarten, wanneer de rotorslip het grootst is, openen de verbreekcontacten van de relais KF1 en KF2.Het openen van de spoelen vindt plaats voordat het KV-blokkeerrelais wordt ingeschakeld en de K1-spoel krijgt geen stroom. Relaiscontacten KF1 en KF2 sluiten weer wanneer het motortoerental synchroon ongeveer 60-95% bereikt, in overeenstemming met de relaisregeling.
Na het sluiten van de contacten van het relais KF1, zal de spoel van de schakelaar K1 inschakelen, de contacten in het hoofdcircuit zullen de startweerstanden Rp kortsluiten en de stator zal inschakelen tot volledige lijnspanning. Wanneer de open contacten van het relais KF2 zijn gesloten, wordt een circuit gemaakt om de spoel van de schakelaar K2 te voeden, onafhankelijk van de schakelaar K1, het contact opent met een snelheid van ongeveer 60% van de synchrone snelheid.
Contactor K2 heeft twee wikkelingen: een hoofdwikkeling die KM1 trekt en de tweede wikkeling KM2, ontworpen om het slot te ontgrendelen dat bij de contactor is geleverd. Na het inschakelen van de opneemspoel KM1 sluiten de sluitcontacten K2 in het excitatiecircuit en openen de openingscontacten K2, waardoor de rotorwikkeling wordt losgekoppeld van de ontladingsweerstanden R1 en R2 en de rotor wordt aangesloten op het DC-netwerk.
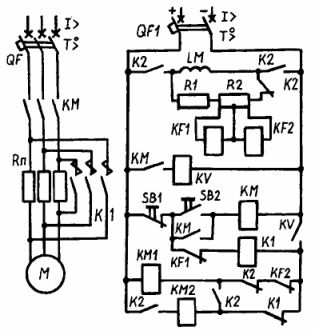
Rijst. 3. Synchroon motorbesturingsschema
De contacten van de schakelaar K2 werken in de volgende volgorde. N / O-contact K2 opent in het voedingscircuit van de opneemspoel, maar de blokkering houdt de schakelaar bekrachtigd. De sluitcontacten K2 sluiten in het voedingscircuit van de twee spoelen en in het circuit van de spoel KM2 en bereiden het circuit voor op het aansluitend inschakelen. Spoel K2 wordt spanningsloos zodra het vergrendelingsmechanisme van spoel KM2 wordt losgelaten. De motor wordt losgekoppeld van het net door op de SB1-knop te drukken.Spoel K1 geeft zijn openingscontact vrij in het circuit van spoel KM2, waardoor de grendel wordt vrijgegeven en spoel KM1 wordt uitgeschakeld, waarna het circuit terugkeert naar zijn oorspronkelijke positie.