Zuigercontrole van de beweging van de mechanismen
Relais circuits
 In afb. 1 toont verschillende varianten van besturingsschema's voor beweging van de zuiger met constante slag, vastgelegd door de SQ-controller.
In afb. 1 toont verschillende varianten van besturingsschema's voor beweging van de zuiger met constante slag, vastgelegd door de SQ-controller.
De diagrammen in afb. 1 wordt a-c gebruikt wanneer de cyclus bestaat uit één "voorwaartse" beweging B en één "achterwaartse" beweging H naar de startpositie. Schema's 1, a en b worden gebruikt met een automatisch commando gegeven door het KQ-relais. Het KT-relais zorgt voor een pauze voordat de achteruit wordt gestart. In het schema van afb. 1 wordt het startcommando van de cyclus gegeven door de controller of universele schakelaar SM.
Om oneindige heen en weer gaande beweging te implementeren, is het diagram in Fig. 1, d. Als het aantal slagen moet worden beperkt door een bepaalde waarde n, is een open contact van een telrelais of een eenheid van meerdere relais, die de pulsen telt die worden geleverd door het sluitcontact van de "terug" -magneetschakelaar KM2, opgenomen in het contactorcircuit « vooruit» KM1.
Een voorbeeld van het uitvoeren van een heen en weer gaande beweging met variabele slaglengte in vier posities wordt getoond in Fig. 2.Contacten SQ.1- SQ.4- van het commando-apparaat SQ worden gebruikt om het mechanisme alternatief uit te schakelen in posities 1-4 van de "voorwaartse" slag, contact SQ.5- in de beginpositie. Het circuit maakt gebruik van pulscommando's die worden gegeven door het automatiseringsrelais KQ1, dat bijvoorbeeld wordt gesloten bij het aanvoeren van het werkstuk, en KQ2, dat het einde van de tussenbewerking aan het einde van elke slag vastlegt.
Sequentiële manoeuvres SQ.1 — SQ.3 van de SQ-controller wordt uitgevoerd door contacten van het relais voor het tellen van het aantal bewegingen van het "terug" -mechanisme KS1, KSZ en KS5. Het relais KS7, dat de vierde beweging "terug" vastlegt, schakelt het relais KS1-KC6 uit en verbiedt de volgende "vooruit"-schakeling totdat het blauw arriveert aan het einde van de technologische operatie met deze groep blanco's (relais KR). Het openingscontact van het KR-relais in het spoelcircuit KC7 brengt het circuit terug naar de oorspronkelijke staat.
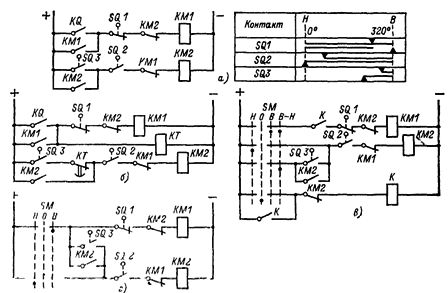
Rijst. 1. Relaisbesturingscircuits voor heen en weer gaande beweging
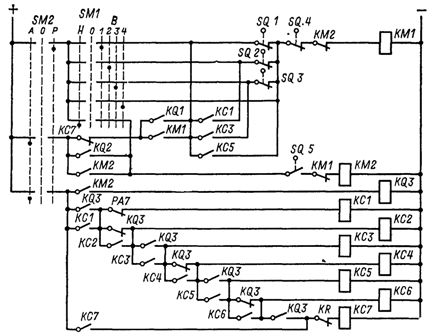
Figuur 2. Besturingsschema van het heen en weer bewegende relais met variabele slaglengte
Logische schakeling
Het besturingscircuit van de zuigerbeweging gemaakt op de elementen van de «Logic T»-serie wordt getoond in Fig. 3. Elementen D1-D3 van het type T-201 worden gebruikt om de ingangsrelaissignalen te coördineren met logische elementen.
Het geheugen van de elementen D4.1, D4.2 fixeert de aanwezigheid van een commando om "vooruit" te gaan wanneer het relais KQ gepulseerd wordt ingeschakeld. Via de versterker D5 wordt de frontcontactor KM1 ingeschakeld. Aan het einde van de beweging van het "voorwaartse" mechanisme, wanneer het contact van de controller SQ 1 is gesloten, verschijnt een signaal 1 aan de uitgang van het overeenkomstige element D2, dat het geheugen D4 en de schakelaar KM1 uitschakelt en inschakelt het geheugen op de elementen D6. In dit geval wordt het commando om "terug" te gaan gegeven en onthouden.Dit commando wordt verwijderd en de achterwaartse beweging wordt gestopt wanneer het contact van de controller SQ 2 sluit in de beginpositie, wanneer signaal 1 verschijnt aan de uitgang van het corresponderende element D3, waardoor het geheugen D6 wordt uitgeschakeld.
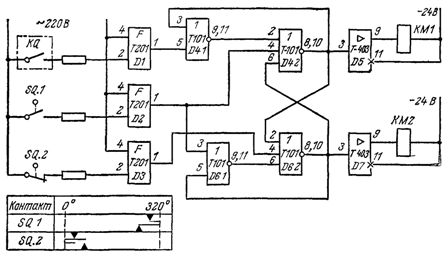
Rijst. 3. Schema voor het regelen van de heen en weer gaande beweging op elementen van de serie «Logic T»
Geheugens D4 en D6 zijn geblokkeerd, dus er kan er maar één worden ingeschakeld. Als geheugen D4 aan staat, wordt signaal 1 van de uitgang van element D4.2 naar ingang 2 van element D6.2 gevoerd, waardoor geheugen D6 wordt uitgeschakeld en vice versa. Wanneer geheugen D6 wordt ingeschakeld, wordt signaal 1 van de uitgang van element D6 2 naar ingang 6 van element D4.2 gevoerd, waardoor geheugen D4 wordt uitgeschakeld.