Apparaten voor het regelen van het motortoerental
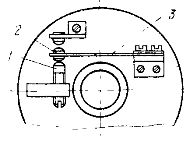
Asynchrone elektromotoren worden veel gebruikt in tegenstroomremcircuits. inductiesnelheidsregelrelais... De ingangsas van het relais 5, waarop een cilindrische permanente magneet 4 is gemonteerd, is verbonden met de as van de elektromotor, waarvan de hoeksnelheid moet worden geregeld.
Wanneer de elektromotor draait, kruist het magnetische veld de draden van de kortsluiting 3 van de roterende stator 6. In de wikkeling wordt een EMF geïnduceerd, waarvan de waarde evenredig is met de hoeksnelheid van de as. Onder invloed hiervan ontstaat er een stroom in de spoel en ontstaat er een wisselwerkingskracht, die de neiging heeft de stator 6 in de draairichting van de magneet te draaien.
Bij een bepaald toerental neemt de kracht zoveel toe dat begrenzer 2, die de weerstand van de platte veer overwint, de relaiscontacten schakelt. Het relais is uitgerust met twee contactpunten: 1 en 7, die afhankelijk van de draairichting worden geschakeld.
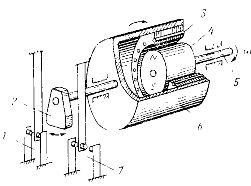
Figuur 1. Inductief snelheidsregelrelais
Een inductiesnelheidsregelrelais heeft een vrij complex ontwerp en een lage nauwkeurigheid die alleen acceptabel kan zijn voor grove regelsystemen. Een hogere nauwkeurigheid van de snelheidsregeling kan worden bereikt door een tachogenerator te gebruiken - een meetmicromachine waarvan de spanning aan de klemmen recht evenredig is met de rotatiesnelheid.
Tachogeneratoren worden gebruikt in feedbacksystemen met variabele snelheidsaandrijving met een breed toerentalbereik en hebben daarom een fout van slechts enkele procenten. De meest voorkomende zijn DC-tachogeneratoren.
In afb. 2 toont een diagram van een snelheidsregelrelais voor een elektromotor M met behulp van een tachogenerator G, waarvan het ankercircuit een elektromagnetisch relais K en een regelweerstand R omvat. Wanneer de spanning op de ankerklemmen van de tachogenerator de bedrijfsspanning overschrijdt, het relais is ingeschakeld in het externe circuit.
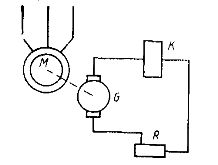
Figuur 2. Snelheidsregelrelais met tachogenerator
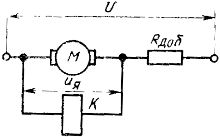
 Figuur 3. Schema van een toerentellerbrug
Figuur 3. Schema van een toerentellerbrug
Naarmate de weerstand van het ankercircuit toeneemt, neemt de nauwkeurigheid van het circuit toe. Daarom is het relais soms verbonden met de tachogenerator via een tussenliggende halfgeleiderversterker. Ook is het mogelijk om hiervoor halfgeleider contactloze drempelelementen met een stabiele aanspreekspanning te gebruiken.
De betrouwbaarheid van de schakeling kan worden verbeterd als de DC-tachogenerator wordt vervangen door een contactloze asynchrone tachogenerator.
Een asynchrone tachogenerator heeft een holle niet-magnetische rotor in de vorm van glas. De stator heeft twee wikkelingen in een hoek van 90° ten opzichte van elkaar. Een van de spoelen is aangesloten op een wisselstroomnet.Van de andere wikkeling wordt een sinusvormige spanning verwijderd, die evenredig is met de snelheid van de rotor. De frequentie van de uitgangsspanning is altijd gelijk aan de frequentie van het net.
 Bij moderne DC Executive-motoren is de tachogenerator ingebouwd in dezelfde behuizing als de machine en op dezelfde as gemonteerd als de hoofdmotor. Dit vermindert de uitgangsspanningsrimpel en verbetert de nauwkeurigheid van de snelheidsregeling.
Bij moderne DC Executive-motoren is de tachogenerator ingebouwd in dezelfde behuizing als de machine en op dezelfde as gemonteerd als de hoofdmotor. Dit vermindert de uitgangsspanningsrimpel en verbetert de nauwkeurigheid van de snelheidsregeling.
DC-tachogeneratoren van het type PT-1 met elektromagnetische excitatie worden vaak gebruikt in elektromotoren uit de PBST-serie. Hoog koppel DC-motoren Ik heb een ingebouwde tachograaf met permanente magneet.
In gevallen waarin de DC-motor M geen tachogenerator heeft, kan de snelheid worden geregeld door de anker-EMF te meten. Hiervoor wordt een tachometrisch brugcircuit gebruikt, dat wordt gevormd door twee weerstanden: R1 en R2, anker Ri en extra polen van de machine Rdp. Uitgangsspanning van tachometerbrug Uout = U1 — Udp, of
Uuit = (Rdp / Rdp + Ri) x E = (Rdp / Rdp + Ri) x cω
De laatste gelijkheid is geldig onder de voorwaarde dat de magnetische flux van de elektromotor constant is. Met een drempelelement aan de uitgang van de tachograafbrug wordt een relais verkregen dat op een bepaalde hoeksnelheid wordt ingesteld. De nauwkeurigheid van de toerentellerbrug is laag vanwege de variabiliteit van de borstelcontactweerstand en de verwarmingsonbalans van de weerstand.
Als de DC-motor op een kunstmatige karakteristiek werkt en er een grote extra weerstand in het anker zit, kan de snelheidsrelaisfunctie worden uitgevoerd door een spanningsrelais dat is aangesloten op de ankerklemmen.
Spanning in het anker van de elektromotor Uja = E + IjaRja.
Aangezien I = (U — E) / (Ri + Rext), we krijgen Ui = (Rext / (Ri + Rext)) x E + (RI / (Ri + Rext)) x U, kan de tweede term worden verwaarloosd en de ankerklemspanning kan worden beschouwd als recht evenredig met de emf en de rotatiesnelheid van de motor.
Figuur 4. Snelheidsregeling met spanningsrelais
 Figuur 5. Centrifugaal snelheidsregelrelais
Figuur 5. Centrifugaal snelheidsregelrelais
Ze hebben een heel eenvoudig ontwerp. centrifugale snelheidsschakelaars... De basis van het relais is een plastic voorplaat 4, gemonteerd op een as, waarvan de rotatiesnelheid moet worden geregeld. Op de frontplaat zijn een platte veer 3 met een massief beweegbaar contact 2 en een vast verstelbaar contact 1. De veer is gemaakt van speciaal staal, waarvan de elasticiteitsmodulus praktisch onafhankelijk is van temperatuurveranderingen.
Wanneer de frontplaat draait, werkt er een middelpuntvliedende kracht op het beweegbare contact, dat bij een bepaalde rotatiesnelheid de weerstand van de platte veer overwint en de contacten verwisselt. Stroom wordt geleverd aan het contactapparaat via sleepringen en borstels, niet weergegeven in de afbeelding. Dergelijke relais worden gebruikt in snelheidsstabilisatiesystemen voor DC-micromotoren. Ondanks zijn eenvoud handhaaft het systeem snelheid met een fout in de orde van grootte van 2%.
