Automatische regelcircuits voor het starten en stoppen van gelijkstroommotoren
 Het starten van een motor gaat gepaard met bepaalde schakelaars in het vermogenscircuit en het stuurcircuit. In dit geval worden relais-magneetschakelaars en contactloze apparaten gebruikt. Voor DC-motoren te beperken beginnende stromingen in het rotor- en ankercircuit van de motoren zijn aanloopweerstanden opgenomen, die worden uitgeschakeld wanneer de motoren stapsgewijs worden versneld. Wanneer het opstarten is voltooid, zijn de opstartweerstanden volledig overbrugd.
Het starten van een motor gaat gepaard met bepaalde schakelaars in het vermogenscircuit en het stuurcircuit. In dit geval worden relais-magneetschakelaars en contactloze apparaten gebruikt. Voor DC-motoren te beperken beginnende stromingen in het rotor- en ankercircuit van de motoren zijn aanloopweerstanden opgenomen, die worden uitgeschakeld wanneer de motoren stapsgewijs worden versneld. Wanneer het opstarten is voltooid, zijn de opstartweerstanden volledig overbrugd.
Ook het remproces van de motoren kan worden geautomatiseerd. Na het stopcommando worden met behulp van de relais-magneetschakelaarapparatuur de nodige schakelaars gemaakt in de stroomcircuits. Bij het naderen van een snelheid die bijna nul nadert, wordt de motor losgekoppeld van het netwerk. Tijdens het opstarten worden trappen met regelmatige tussenpozen of afhankelijk van andere parameters uitgeschakeld. Dit verandert de stroom en snelheid van de motor.
Motorstartcontrole wordt uitgevoerd als een functie van EMF (of snelheid), stroom, tijd en pad.
Typische subassemblages en circuits voor automatische besturing van startende gelijkstroommotoren
Het starten van een DC-motor met parallelle of onafhankelijke excitatie gebeurt met een weerstand die in het ankercircuit is geïntroduceerd. Om de inschakelstroom te beperken is een weerstand nodig. Naarmate de motor versnelt, wordt de startweerstand getrapt. Wanneer de start is voltooid, wordt de weerstand volledig overbrugd en keert de motor terug naar zijn natuurlijke mechanische kenmerken (fig. 1). Bij het opstarten accelereert de motor volgens kunstmatige karakteristiek 1, dan 2, en na het manoeuvreren van de weerstand - volgens natuurlijke karakteristiek 3.
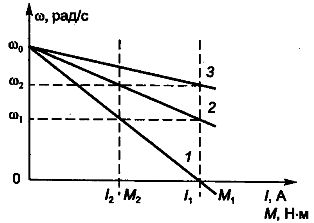
Rijst. 1. Mechanische en elektromechanische kenmerken van een gelijkstroommotor met parallelle excitatie (ω — hoeksnelheid van rotatie; I1 M1 — piekstroom en koppel van de motor; I2 M2 — stroom en schakelmoment)
Beschouw het startcircuitknooppunt van de DC-motor (DCM) in de EMF-functie (Fig. 2).
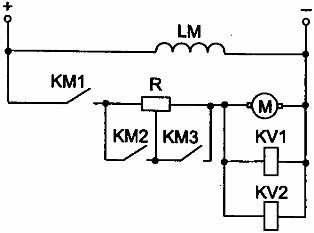
Rijst. 2. Het startcircuitknooppunt van DCT van parallelle excitatie in de EMF-functie
De EMF (of snelheid) functie wordt bestuurd door relais, spanningen en schakelaars. Spanningsrelais zijn geconfigureerd om te werken met verschillende emf-waarden van het anker. Wanneer de schakelaar KM1 is ingeschakeld, is de spanning van het KV-relais op het moment van starten niet voldoende voor gebruik. Wanneer de motor versnelt (vanwege de toename van de emf van de motor), wordt het KV1-relais geactiveerd en vervolgens KV2 (de activeringsspanningen van het relais hebben overeenkomstige waarden); ze omvatten de versnellingsmagneetschakelaars KM2, KMZ, en de weerstanden in het ankercircuit zijn geshunt (magneetschakelaarschakelcircuits worden niet getoond in het diagram; LM is de excitatiewikkeling).
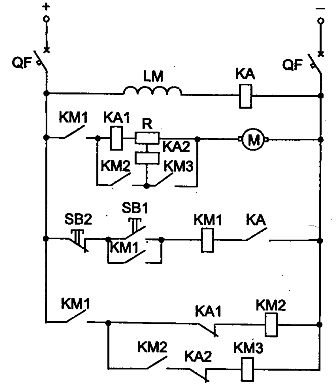
Laten we eens kijken naar het schema voor het starten van een DC-motor in de EMF-functie (Fig. 3). De hoeksnelheid van de motor is vaak indirect gefixeerd, d.w.z.het meten van grootheden gerelateerd aan snelheid. Voor een gelijkstroommotor is een dergelijke waarde de EMF. De start wordt als volgt uitgevoerd. De QF-stroomonderbreker gaat aan, het motorveld is aangesloten op de voeding. Het KA-relais activeert en sluit zijn contact.
De resterende apparaten van het circuit blijven in hun oorspronkelijke positie. Om de motor te starten, moet u druk op de knop SB1 «Start», waarna contactor KM1 wordt geactiveerd en de motor met de stroombron verbindt. Contactor KM1 is zelfvoedend.De gelijkstroommotor wordt versneld met de weerstand R van het motorankercircuit.
Naarmate de snelheid van de motor toeneemt, nemen de emf en de spanning in de spoelen van de relais KV1 en KV2 toe. Bij snelheid ω1 (zie Fig. 1.) wordt relais KV1 geactiveerd. Het sluit zijn contact in contactorcircuit KM2, dat de eerste trap van de startweerstand activeert en kortsluit met zijn contact. Bij snelheid ω2 wordt relais KV2 bekrachtigd. Met zijn contact sluit hij het voedingscircuit van de KMZ-magneetschakelaar, die bij activering met een contact de tweede starttrap van de startweerstand kortsluit. De motor bereikt zijn natuurlijke mechanische kenmerken en beëindigt de start.
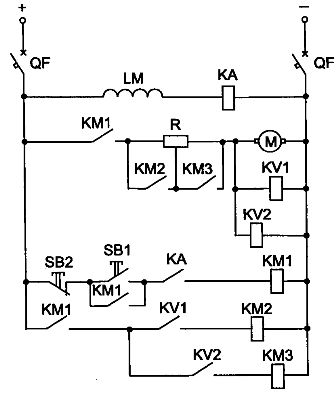
Rijst. 3. Schema van het starten van DCT van parallelle excitatie in de EMF-functie
Voor de juiste werking van het circuit is het noodzakelijk om het spanningsrelais KV1 in te stellen om te werken bij de EMF die overeenkomt met de snelheid ω1 en het relais KV2 om te werken bij de snelheid ω2.
Druk op de stopknop SB2 om de motor te stoppen. Om het elektrische circuit los te koppelen, opent u de QF-stroomonderbreker.
De stroomfunctie wordt bestuurd door een stroomrelais. Beschouw het knooppunt van het DC-motorstartcircuit in de fluxfunctie. In het diagram getoond in Fig.4 worden overstroomrelais gebruikt, die bij de inschakelstroom I1 aantrekken en bij de minimale stroom I2 uitvallen (zie afb. 1). De interne reactietijd van de stroomrelais moet kleiner zijn dan de reactietijd van de contactor.
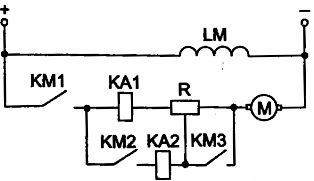
Rijst. 4. Het startcircuitknooppunt van de parallelle excitatie-DCT, afhankelijk van de stroom
De motorversnelling begint wanneer de weerstand volledig in het ankercircuit is gestoken. Naarmate de motor accelereert, neemt de stroom af, met stroom I2 verdwijnt het relais KA1 en sluit met zijn contact het voedingscircuit van de schakelaar KM2, die het eerste contact van de startweerstand met zijn contact omzeilt. Evenzo is de tweede starttrap van de weerstand kortgesloten (relais KA2, contactor KMZ). De vermogenscircuits van de contactor worden niet weergegeven in het diagram. Aan het einde van het starten van de motor zal de weerstand in het ankercircuit worden overbrugd.
Beschouw het circuit voor het starten van een gelijkstroommotor als een fluxfunctie (fig. 5). De weerstanden van de weerstandstrappen zijn zo gekozen dat op het moment dat de motor wordt ingeschakeld en de trappen worden overbrugd, de stroom I1 in het ankercircuit en het moment M1 het toegestane niveau niet overschrijden.
Een gelijkstroommotor starten wordt uitgevoerd door de stroomonderbreker QF in te schakelen en op de «Start»-knop SB1 te drukken. In dit geval wordt contactor KM1 geactiveerd en sluit zijn contacten. De inschakelstroom I1 passeert het vermogenscircuit van de motor, onder invloed waarvan het overstroomrelais KA1 wordt geactiveerd. Het contact wordt geopend en contactor KM2 krijgt geen stroom.
Rijst. 5. Schema van parallelle excitatie DCT-opstart als functie van stroom
Wanneer de stroom daalt tot de minimale waarde I2, valt het overstroomrelais KA1 weg en sluit het contact.De contactor KM2 wordt geactiveerd en overbrugt via zijn hoofdcontact het eerste deel van de startweerstand en relais KA1. Bij het schakelen stijgt de stroom naar de waarde I1.
Wanneer de stroom weer toeneemt tot de waarde van I1, wordt de schakelaar KM1 niet ingeschakeld, omdat de spoel wordt overbrugd door het contact KM2. Onder invloed van de stroom I1 wordt het relais KA2 geactiveerd en opent zijn contact. Wanneer tijdens het accelereren de stroom weer daalt tot de waarde van I2, valt het relais KA2 weg en wordt de schakelaar KMZ ingeschakeld. De start is voltooid, de motor werkt met zijn natuurlijke mechanische eigenschappen.
Voor de correcte werking van het circuit is het noodzakelijk dat de reactietijd van de relais KA1 en KA2 kleiner is dan de reactietijd van de schakelaars. Om de motor te stoppen, drukt u op de «Stop»-knop SB2 en schakelt u de stroomonderbreker QF uit om het circuit los te koppelen.
De tijdregeling vindt plaats met behulp van een tijdrelais en bijbehorende schakelaars die de weerstandstrappen met hun contacten kortsluiten.
Beschouw het startcircuitknooppunt DC-motor als een functie van de tijd (fig. 6) Het tijdrelais KT wordt onmiddellijk geactiveerd wanneer spanning verschijnt in het stuurcircuit via het openingscontact KM1. Na het openen van het contact KM1 verliest het tijdrelais KT zijn voeding en sluit het contact met een tijdvertraging. Contactor KM2 na een tijdsinterval gelijk aan de tijdsvertraging van het tijdrelais krijgt stroom, sluit zijn contact en shunt de weerstand in het ankercircuit.
Rijst. 6. Het DCT-startcircuitknooppunt van parallelle excitatie als functie van de tijd
De voordelen van controle in de functie van tijd zijn onder meer bedieningsgemak, stabiliteit van het versnellings- en vertragingsproces, gebrek aan vertraging van de elektrische aandrijving bij tussenliggende snelheden.
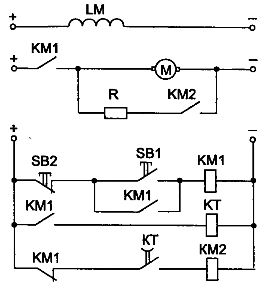
Beschouw het circuit voor het starten van een parallelle excitatie van een DC-motor als een functie van de tijd. In afb. 7 toont een diagram van een onomkeerbare start DC-parallelle bekrachtigingsmotor. De lancering vindt plaats in twee fasen. Het circuit gebruikt knoppen SB1 «Start» en SB2 «Stop», schakelaars KM1 ... KMZ, elektromagnetische tijdrelais KT1, KT2. De QF-onderbreker gaat aan. In dit geval krijgt de spoel van het tijdrelais KT1 stroom en opent zijn contact in het circuit van de schakelaar KM2. De motor wordt gestart door op de «Start»-knop SB1 te drukken. Contactor KM1 ontvangt stroom en verbindt met zijn hoofdcontact de motor met een stroombron met een weerstand in het ankercircuit.
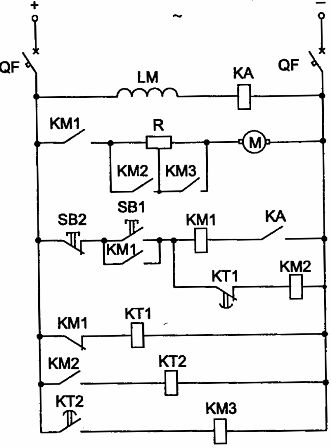
Rijst. 7. Schema van het onomkeerbaar starten van een gelijkstroommotor als functie van de tijd
Het onderstroomrelais KA dient om de motor te beschermen tegen onderbreking van het bekrachtigingscircuit. Tijdens normaal bedrijf wordt het KA-relais bekrachtigd en sluit het contact in het circuit van de KM1-magneetschakelaar, waardoor de KM1-magneetschakelaar wordt voorbereid voor gebruik. Wanneer het excitatiecircuit wordt verbroken, schakelt het KA-relais uit, opent het contact, vervolgens schakelt de KM1-schakelaar uit en stopt de motor. Wanneer de schakelaar KM1 wordt geactiveerd, sluit het blokkeercontact en opent het contact KM1 in het relaiscircuit KT1, dat uitschakelt en zijn contact met een tijdvertraging sluit.
Na een tijdsinterval dat gelijk is aan de tijdvertraging van het relais KT1, wordt het voedingscircuit van de versnellende schakelaar KM2 gesloten, die wordt geactiveerd en met zijn hoofdcontact een trap van de startweerstand kortsluit. Tegelijkertijd wordt het tijdrelais KT2 bekrachtigd. De motor versnelt. Na een tijdsinterval gelijk aan de vertraging van het KT2-relais, sluit het KT2-contact, wordt de KMZ-versnellingsmagneetschakelaar geactiveerd en maakt met zijn hoofdcontact contact met de tweede trap van de startweerstand in het ankercircuit. De start is voltooid en de motor keert terug naar zijn natuurlijke mechanische eigenschappen.
Typische DC-rembesturingscircuiteenheden
Automatische besturingssystemen voor gelijkstroommotoren maken gebruik van dynamisch remmen, tegengesteld remmen en regeneratief remmen.
Bij dynamisch remmen is het noodzakelijk om de ankerwikkeling van de motor te sluiten tot een extra weerstand en de bekrachtigingswikkeling bekrachtigd te laten. Dit remmen kan gebeuren als functie van snelheid en als functie van tijd.
Regeling als een functie van snelheid (EMF) tijdens dynamisch remmen kan worden gedaan volgens het schema getoond in Fig. 8. Wanneer de KM1-magneetschakelaar is uitgeschakeld, is het motoranker losgekoppeld van het net, maar staat er spanning op de klemmen op het moment van loskoppelen. Het spanningsrelais KV werkt en sluit zijn contact in het circuit van de schakelaar KM2, die met zijn contact het anker van de motor sluit naar de weerstand R.
Bij snelheden die dicht bij nul liggen, verliest het KV-relais vermogen. Verdere vertraging van minimumsnelheid tot volledige stop vindt plaats onder invloed van een statisch weerstandsmoment.Om de remefficiëntie te verhogen, kunnen er twee of drie remfasen worden toegepast.
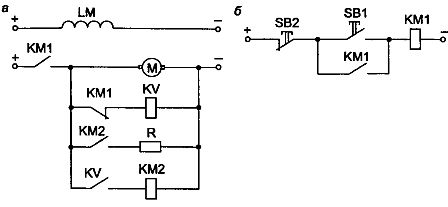
Rijst. 8. Knooppunt van het circuit voor automatische regeling van dynamisch remmen in de EMF-functie: a — vermogenscircuit; b - regelcircuit
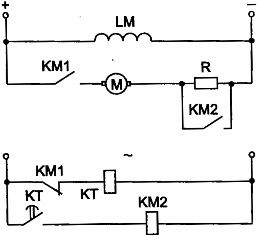
Dynamisch remmen constante motoronafhankelijke excitatie als functie van de tijd wordt uitgevoerd volgens het schema getoond in Fig. negen.
Rijst. 9. Knooppunt van het DCT dynamische remcircuit van onafhankelijke excitatie als functie van de tijd
Als de motor draait, is het tijdrelais KT ingeschakeld, maar het circuit van de remmagneetschakelaar KM2 is open. Om te stoppen, moet u op de knop "Stop" SB2 drukken. Magneetschakelaar KM1 en tijdrelais KT verliezen stroom; de schakelaar KM2 wordt geactiveerd doordat het contact KM1 in het circuit van de schakelaar KM2 sluit en het contact van het tijdrelais KT opent met een tijdsvertraging.
Voor de timing van het tijdrelais ontvangt de schakelaar KM2 stroom, sluit het contact en verbindt het motoranker met de extra weerstand R. Een dynamische stop van de motor wordt uitgevoerd. Aan het einde opent het KT-relais na enige tijd zijn contact en ontkoppelt de KM2-magneetschakelaar van het netwerk. Verder remmen tot volledige stilstand vindt plaats onder invloed van het weerstandsmoment Ms.
Bij remmen in omgekeerde richting werken de EMF van de motor en de netspanning in overeenstemming. Om de stroom te begrenzen wordt er een weerstand in de schakeling gestoken.
Excitatieregeling van gelijkstroommotoren
De veldwikkeling van de motor heeft een flinke inductantie en als de motor snel wordt uitgeschakeld kan er een grote spanning op komen te staan waardoor de isolatie van de wikkeling kapot gaat. Om dit te voorkomen, kunt u de circuitknooppunten gebruiken die worden getoond in Fig.10. De blusweerstand wordt parallel met de excitatiespoel ingeschakeld via de diode (Fig. 10, b). Daarom gaat de stroom na het uitschakelen korte tijd door de weerstand (fig. 10, a).

Rijst. 10. Knooppunten van circuits voor het inschakelen van blusweerstanden: a — blusweerstand is parallel geschakeld; b — de blusweerstand wordt ingeschakeld via de diode.
Beveiliging tegen onderbreking van het excitatiecircuit wordt uitgevoerd met behulp van een onderstroomrelais volgens het schema getoond in Fig. elf.

Rijst. 11. Beveiliging tegen onderbreking van het bekrachtigingscircuit: a — vermogensbekrachtigingscircuit; b - regelcircuit
In het geval van een breuk in de bekrachtigingsspoel, valt het relais KA af en ontkoppelt het circuit van de contactor KM.