Elektrische wagenaandrijving met bovenloopkranen
Een trolley met een bovenloopkraan is een onafhankelijk onderdeel van een hefinrichting en is ontworpen om lasten binnen het bereik van de bovenloopkraan te verplaatsen met een technologisch bepaalde bewegingssnelheid en de noodzakelijke nauwkeurigheid van het positioneren van de last. De draaistelaandrijving is een van de hoofdcomponenten van bovenloopkraanapparatuur.
De trolley beweegt op het spoor van een bovenloopkraan. De brug zelf beweegt in een richting loodrecht op de bewegingsrichting van de kar. Op de kar is een hefmechanisme geïnstalleerd, dat is uitgerust met een haak (of elektromagneet) waarmee u de lading kunt verplaatsen. De beweging van het draaistel is een integraal onderdeel van de technologische cyclus van de bovenloopkraan (Fig. 1).
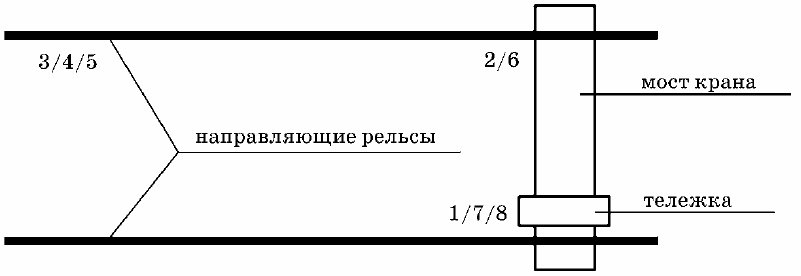
Rijst. 1. Schema voor het uitvoeren van werkzaamheden met een brugkraan in een werkcyclus
Deze cyclus bestaat uit de volgende bewerkingen (in afbeelding 1 worden de bewerkingsnummers weergegeven in cijfers):
1 — het heffen van de last;
2 — de kar naar een bepaalde positie verplaatsen;
3 — het verplaatsen van de kraan naar een vooraf bepaalde positie;
4 — vermindering van het gewicht van de last;
5 — het optillen van de haak met het gewicht van de last;
6 — de kraan naar zijn oorspronkelijke positie verplaatsen;
7 — de kar naar zijn oorspronkelijke positie verplaatsen;
8 - het laten zakken van de haak.
Zoals te zien is in de procescyclus van de bovenloopkraan, wordt de aandrijfmotor van de trolley ingeschakeld in de tweede en zevende operatie. Wanneer het draaistel een bepaalde positie in de afstand van de bovenloopkraan nadert, wordt de elektromotor van de draaistelaandrijving elektrisch afgeremd om de vereiste remnauwkeurigheid te waarborgen.
De motor wordt dan uitgeschakeld en er wordt mechanisch geremd. Bovendien wordt de elektrische aandrijving van de brugbeweging ingeschakeld en beweegt de lading langs de werkplaats volgens de technologische taak. Bij het bereiken van de aangewezen plaats stopt de kraan, wordt de last neergelaten en worden de nodige technologische handelingen uitgevoerd.

Het kinematische diagram van het wagenbewegingsmechanisme met bovenloopkranen wordt getoond in figuur 2. Het wagenbewegingsmechanisme is gemaakt volgens het schema met een versnellingsbak in het midden tussen de aandrijfwielen.
De aandrijving van de elektromotor D via de remschijf T, versnellingsbak P, koppelingen M en assen B wordt overgebracht op de loopwielen. Een rempoelie wordt gebruikt om de wagen stil te houden.
De wagen heeft vier reiswielen en twee aandrijfwielen. De loopwielen van kraanwagens zijn meestal uitgevoerd met twee ribben.
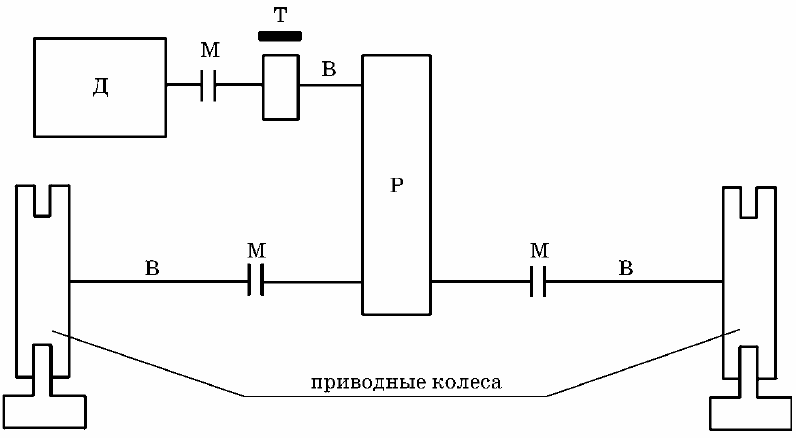
Rijst. 2. Kinematisch diagram van het bewegingsmechanisme van de trolley
De tijd om de wagen naar de opgegeven positie te verplaatsen, wordt bepaald door rekening te houden met de tijd om de wagen met de vereiste versnelling te versnellen en te vertragen.Op basis van de voorwaarden van het technologische proces moet het tachogram bij het verplaatsen van de kar de vorm hebben die wordt weergegeven in figuur 3.
Het is noodzakelijk om te zorgen voor een soepele start van het draaistelmechanisme tot een bepaalde snelheid met de vereiste acceleratie. Om de nodige positioneringsnauwkeurigheid te garanderen, is een soepele vertraging van de elektrische aandrijving met een overgang naar verminderde snelheid vereist, waarna de trolley stopt.
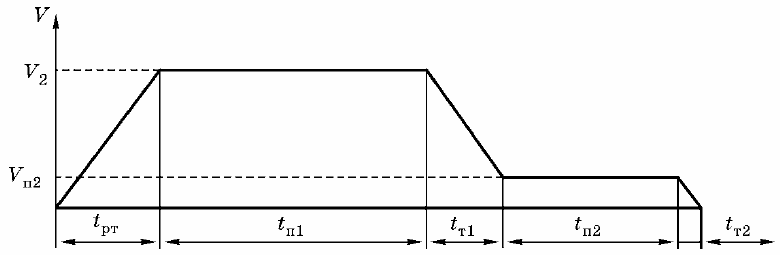
Rijst. 3. Tachogram van het bewegingsmechanisme van de trolley
De beweging van het draaistel met stoten op de metalen structuur in de railverbindingen, intense versnelling en vertraging, natuurlijke trillingen van de metalen structuur wanneer de machines worden geladen, veroorzaken zeer intense mechanische schokken op de elektrische apparatuur die zich op het draaistel van de brugkraan bevindt. Op basis hiervan moet de elektrische aandrijving voor het verplaatsen van de trolley voldoen aan de volgende eisen:
1) de elektrische aandrijving moet de mogelijkheid bieden om het mechanisme in beweging te brengen, de bewegingsrichting om te keren en het mechanisme te stoppen met de vereiste versnelling (m / s2) en correcte positioneringsnauwkeurigheid (mm);
2) de elektrische aandrijving moet zorgen voor een soepele snelheidsregeling vanaf de hoofdleiding;
3) het ontwikkelde motorkoppel moet zorgen voor de werking van het mechanisme met een bepaalde intensiteit;
4) bij een bepaald aantal motorstarts per uur mogen de wikkelingen niet oververhit raken, waardoor een langdurige stilstand van het mechanisme mogelijk is;
5) de motor moet worden geselecteerd in overeenstemming met de bedrijfsomstandigheden, dat wil zeggen, hij moet een geschikt ontwerp hebben en de wikkelingen moeten hittebestendig zijn en zijn geïsoleerd tegen vocht;
6) de aandrijfmotor moet de kleinste vliegwielmassa's hebben die een aanzienlijke invloed hebben op de stroom van transiënten tijdens veelvuldig starten van de aandrijving;
7) de aandrijfmotor moet overeenkomen met de kracht van het loopmechanisme en de nodige overbelastingscapaciteit hebben;
8) de elektrische aandrijving moet zorgen voor de vorming van voorbijgaande processen met een minimale duur;
9) Bij het ontwerp van de elektrische aandrijving moet rekening worden gehouden met veiligheid en onderhoudsgemak.

Het statische moment voor bewegingsmechanismen die op een horizontale spoorlijn in een productiefaciliteit werken, wordt gecreëerd door glijdende wrijvingskrachten in de lagers en rolwrijving van de bogiewielen die over de rails van de bovenloopkraan rollen. Het statische moment van het mechanisme tijdens de voorwaartse beweging van de trolley wordt bepaald door het hefvermogen van de kraan. Het statische moment van het mechanisme tijdens de achterwaartse beweging van het draaistel wordt berekend voor een onvolledige lading.
Voor elektrische aandrijving van loopkatten van bovenloopkranen, asynchrone kooiankerrotormotoren (incl als onderdeel van een aandrijving met variabele frequentie), inductiemotoren met gewikkelde rotor en onafhankelijk opgewekte gelijkstroommotoren.