Regelcircuits voor elektrische aandrijving
 Afhankelijk van de snelheid van passagiersliften, worden de volgende soorten vermogensregelingscircuits toegepast:
Afhankelijk van de snelheid van passagiersliften, worden de volgende soorten vermogensregelingscircuits toegepast:
-
langzame liften hebben eekhoornkooi- of faserotormotoren en een knop- of hendelbediening,
-
hogesnelheidsliften - motoren met twee of één snelheid bestuurd door magnetische stations of thyristorbesturingsstations (TSU-R) met bedieningsknoppen,
-
hogesnelheids- en hogesnelheidsliften - DC-motoren bestuurd door het "generator - motor" -systeem met verschillende excitatieschema's of door het "thyristoromvormer - motor" -systeem met knoppen,
-
kettingen van asynchrone klepcascades (AVK) kunnen ook worden gebruikt, waarvan het gebruik het mogelijk maakt om de efficiëntie te verhogen. installatie.
Passagiersliften zijn, afhankelijk van de passagiersstroom, de hefhoogte en het aantal liften dat passagiers bedient, onderverdeeld in enkele en groepsbesturing.
Singles zijn onder meer:
a) liften die werken op enkele bestellingen en oproepen zonder kruisingen stoppen tijdens het dalen en stijgen van passagiers,
b) liften met instappen van passagiers bij het naar beneden gaan, maar met een belverbod bij het naar boven gaan,
c) hetzelfde, maar met registratie van oproepen bij het afdalen met de daaropvolgende uitvoering.
Groepsbediende liften zijn onder andere:
a) liften met één knop voor het oproepen van de landingsplaatsen, ongeacht het aantal geïnstalleerde liften (dubbele bediening wordt vaker gebruikt) en met instappen van passagiers bij het afdalen,
b) hetzelfde, maar met de volledige verzameling passagiers op de tussenliggende verdiepingen voor het in- en uitstappen (meestal geïnstalleerd in administratieve, onderwijs- en andere gebouwen).
Bovendien is het heel gebruikelijk om liften naar een aantal huizen en hele buurten te sturen, waarbij de toestand van de circuits wordt bewaakt vanaf één meldkamer en meerdere liften worden aangestuurd.
Ongeacht de snelheid van de liften, enkele of groepsbesturing ervan, de noodzakelijke elementen van de meeste van hun schema's zijn als volgt:
-
zelfinstellende knoppen, plak- of sluitknoppen voor het oproepen van taxi's en het geven van een opdracht vanuit de cabine,
-
verschillende selectiesensoren en nauwkeurige stop-matching-apparaten om de locatie van de cabine en de toestand van de elektrische circuits te registreren,
-
sensoren en vergrendelingen voor de staat van de hijskabels, de staat van de mijn- en cabinedeuren (open of gesloten),
-
eindschakelaars om de snelheid en mate van cabinebelasting te beperken,
-
indicatoren voor de bewegingsrichting van de kooi en, in sommige liften, de aanwezigheid van een lading in de kooi.
Van deze items zullen we meer in detail stilstaan bij position matching devices (PSC's), die de plaats bepalen waar de mijnwagen moet stoppen wanneer een oproep of bestelling plaatsvindt, en de beweging omhoog of omlaag.De overige items zijn meestal diverse modificaties van eindschakelaars die bekend zijn uit andere cursussen.
Structureel worden positie-aanpassingsapparaten geïmplementeerd in de vorm van een set elektromechanische of inductieve of magnetische (riet) sensoren met drie posities in mijnen, met signalen uitgevoerd naar een relais of contactloze selector in de machinekamer (CCP's worden soms geïmplementeerd in de vorm van centrale vloerunits in de machinekamer) …
De sensoren in de mijn werken samen met de op de cabine gemonteerde aftakkingen (voor elektromechanische) of magnetische shunts (voor inductieve of reed-schakelaars) en sturen signalen naar de centrale vloereenheid (stappenkopieerapparaat of relaisrelais) die in de machinekamer is geïnstalleerd, en de laatstgenoemde verzendt en een besturingscircuit - een signaal om de ontvangen opdracht uit te voeren.
Het is handiger om de sensoren voor autobewegingssignalen hoger of lager in de auto te plaatsen (er zijn minder draden nodig) en magnetische shunts in de mijnen te installeren op de noodzakelijke punten. In dit geval is bij digitale besturing het aantal kolommen met geïnstalleerde shunts langs de schacht gelijk aan het aantal bits van het verzonden verdiepingsnummer in binaire of andere code.
Elektromechanische schakelaars met drie standen worden verplaatst naar een van de standen die overeenkomen met de beweging van de cabine omhoog of omlaag, of de stop, door middel van een oprolmechanisme.In dit geval, wanneer de auto rijdt, worden de contacten van de schakelaars op de gepasseerde verdiepingen ingeschakeld naar een van de eindposities, ter voorbereiding op de actie van de reeks oproepen en bevelen, en wanneer de auto stopt, is de schakelaar verplaatst naar de middelste positie, waardoor het stuurcircuit van de directionele schakelaars wordt uitgeschakeld en dus wordt voorkomen dat de auto de vloer verlaat wanneer de opdracht- of belknop per ongeluk wordt ingedrukt.
Om ervoor te zorgen dat de liftkooi relatief nauwkeurig wordt geremd, werden recentelijk contactloze inductieve of contactverzegelde magnetisch gestuurde (reed) sensoren gebruikt in hun regelcircuits. Deze sensoren zijn zowel in de mijn als in de cabine geïnstalleerd: in de mijn zijn er sensoren voor selectie (vertraging) en in de cabine is er een sensor voor nauwkeurig stoppen. Om met de sensoren te communiceren, wordt een magnetische selectieve lantaarnshunt op de cockpit geplaatst en worden ferromagnetische precisiestop-shunts in de schacht geplaatst (op elke verdieping).
Inductieve sensoren bestaan uit een open U-vormig magnetisch circuit met een spoel ingesloten in een behuizing. De wikkeling van het uitvoerende relais is daarmee in serie geschakeld en er wordt een wisselstroomspanning (U) op toegepast.
Met een open magnetisch circuit is de magnetische flux die de spoel doorkruist klein. Vandaar de e.m.f. en de zelfinductiestroom in de spoeldraden, evenals de daardoor veroorzaakte inductieve weerstand (X), zijn praktisch afwezig, dus de weerstand van de spoel is actief (R). De stroom in in serie geschakelde spoelen is relatief groot; imiteert het sluiten van de contacten in het contactsysteem (het relais gaat aan).
Wanneer de shunt het U-vormige magnetische circuit sluit, neemt de magnetische flux die de spoel doorkruist toe en dus neemt de emf toe. zelfinductie en daardoor de inductieve weerstand van de spoel. Als gevolg hiervan neemt de stroom in de in serie geschakelde spoelen af, waardoor de opening van het circuit in het contactsysteem wordt gesimuleerd (het uitvoerende relais is uitgeschakeld).
De reed-schakelaar is een U-vormig lichaam waarin aan de ene kant van de groef twee verzegelde glazen kolven zijn geplaatst met een vacuüm erin en contacten bevestigd op veerplaten die zijn verbonden met de respectieve liftbesturingscircuits. Aan de andere kant van de sleuf zit een permanente magneet. Het werkende element van dergelijke sensoren is een ferromagnetische shunt die door de U-vormige snede gaat wanneer de liftkooi beweegt.
Het werkingsprincipe van deze sensoren is als volgt: de veerkrachten van de contactplaten van de reed-schakelaars zijn zo gericht dat als het veld van een permanente magneet er niet op inwerkt, de normaal open contacten open zijn en de normaal gesproken gesloten contacten zijn gesloten, d.w.z. de circuits waarop deze contacten zijn aangesloten, worden geopend of gesloten.
Deze toestand van de reed-schakelaar is wanneer de ferromagnetische shunt zich in de groef van een U-vormig lichaam bevindt, omdat de magnetische veldlijnen van de permanente magneet over de shunt gesloten zijn. Zodra de shunt de groef verlaat, zijn de magnetische veldlijnen over de shunt gesloten. de platen, die hun veerwerking overwinnen, en de reed-schakelaarcontacten, en dus de circuits waarmee ze zijn verbonden, gaan in de tegenovergestelde toestand.

Als voorbeeld dat de belangrijkste kenmerken van liftbesturingsschema's weergeeft, kunt u het besturingsschema voor een enkele lift zonder bijbehorende stops in Fig. 1. De lift bedient vier verdiepingen; een asynchrone motor met twee snelheden M wordt gebruikt als uitvoerende motor.
De opname van lage (Ml) of hoge (B) motoromwentelingen wordt uitgevoerd door de overeenkomstige schakelaars Ml en B. De draairichting van de motor wordt bepaald door schakelaars B en H, vertraging - door een extra weerstand P, stoppen - door elektromagnetische rem ET.
Gebruikt als vloerschakelaars contactloze inductieve sensoren (DTS, DTOV en DTON) in serie geschakeld met de relaisspoelen (RIS, RITOV, RITON). De TTP-sensoren worden gebruikt om de liftaandrijving op hoge snelheid in te schakelen en een impuls te geven om te vertragen, terwijl de DTOV- en DTON-sensoren zijn ontworpen om de lift precies te stoppen op het vloerniveau van de overeenkomstige verdieping en op de kooi worden geplaatst, magnetische shunts daarvoor zijn geïnstalleerd in de as van de as.
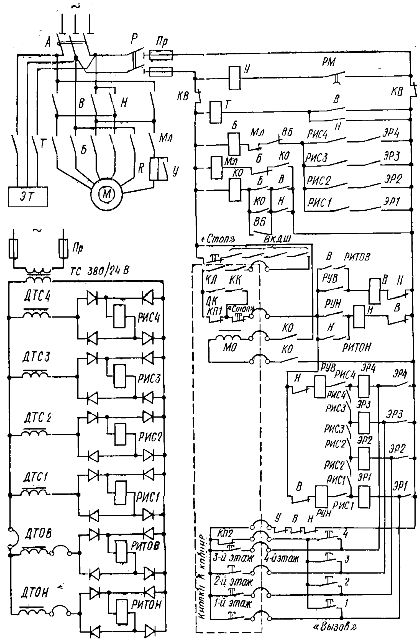
Rijst. 1. Schematisch diagram van een enkele liftbesturing
Laten we het doel van de resterende elementen van het circuit en de werking ervan bekijken aan de hand van het voorbeeld van het verplaatsen van een cabine met een passagier van de 1e naar de 3e verdieping, ervan uitgaande dat de automatische machine A, de scheider P en de eindschakelaars KB die de beweging van de cabine op en neer in noodmodi, zijn gesloten en de cabine bevindt zich op de begane grond. In dit geval stromen de spoelen van het RIS-relais, naast het relais van de eerste verdieping, uit de nominale stroom.
Wanneer de knop «3e verdieping» wordt ingedrukt, wordt het volgende elektrische circuit gevormd: netwerkfase — pool van de scheider P — zekering Pr — eindschakelaar KB — knop «Stop» — vergrendeling van de mijndeuren D1 — D4 — contacten voor spannen het touw KK — veiligheidseindschakelaar KL — cabinedeurschakelaars DK — contacten van de «Stop»-knop — openingsblokkeercontact Н — relaisspoel RUV — sluitcontacten van relais RIS4 en RISZ (de spoelen van deze relais voeren stroom) — spoel van verdiepingsrelais ERZ — knop «3e verdieping» — openingsblokken — contacten van schakelaars U, B, N — eindschakelaar KB — zekering R — scheidingspool P — netwerkfase.
Nadat relais RUV en ER3 zijn geactiveerd, worden voorwaartse bewegingsschakelaar B, snelle bewegingsschakelaar B (op spoelcircuit B - blokkeercontact ML - hogesnelheidsschakelaar VB - relaiscontacten RISZ en ER3) ingeschakeld. Wanneer de contacten B en B gesloten zijn, is de motor verbonden met het net, de schakelaar T, de ontgrendelpoelie en de shuntschakelaar KO, die de shuntsolenoïde MO inschakelt en het circuit van de lagesnelheidsschakelaarspoel Ml voorbereidt, zijn ingeschakeld. De slag trekt zich terug, laat de vergrendelingshendel los en de cabine begint te bewegen.
Wanneer de cabine de derde verdieping nadert, sluit de ferromagnetische shunt de spoel van de TTSZ-sensor, neemt de weerstand toe en verdwijnt het RISZ-relais, waardoor de ER3- en RUV-relais worden uitgeschakeld. Dientengevolge verdwijnt schakelaar B, sluit zijn contact, schakelt de lagesnelheidsschakelaar Ml in en schakelaar B blijft aan, omdat wanneer de auto rijdt, het magnetische circuit van de precieze remsensor nog niet gesloten is, daarom is de RITOV-contact nog steeds niet open.De motor wordt gestopt bij lage snelheid en werkt in generatormodus met een weerstand R. geïntroduceerd in één fase van de stator.
Zodra de vloer van de auto is uitgelijnd met de vloer van de vloer, sluit de magnetische shunt het magnetische circuit van de spoel van de exacte stopsensor DTOV, het relais RITOV verdwijnt en de schakelaars B, dan KO en tenslotte ML worden gedraaid Hierdoor worden de elektromagneet van de motor en de rem losgekoppeld van het net, wordt de mechanische rem aangetrokken en komt de cabine tot stilstand.
Een collectief schema leren voor het besturen van liften met passerende stops alleen bij het neerlaten van de kooi of een volledig collectief schema, d.w.z. wanneer het passeren stopt terwijl de auto op en neer beweegt, is het nodig in een schema vergelijkbaar met dat besproken in fig. 1, introduceer enkele toevoegingen. In een motorcircuit met twee snelheden zijn bijvoorbeeld de ID-inductieve sensoren, het RIS-relais en de bel- en bestelknoppen op elke verdieping opgenomen, zoals weergegeven in Fig. 2.
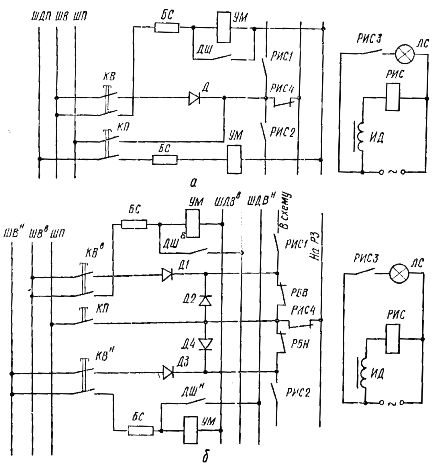
Rijst. 2. Fragmenten van toevoegingen aan collectieve liftbesturingsschema's (één verdieping)
In een schema met inhaalstops bij het neerlaten van de cabine (fig. 2, a), worden oproepen en bevelen gegeven door afzonderlijke plakknoppen en kunnen daarom op elk moment worden geregistreerd en onmiddellijk naar het schema worden verzonden, behalve tijdens de bewegingsperiode van de cabine met passagiers omhoog wanneer de voedingsbus van de overdrachtscontacten oproepen naar het uitvoerende circuit worden uitgeschakeld door selectieve contacten van de positieve bus.
In het volledige selectieve besturingsschema (Fig. 2, b) zijn er bovendien belcircuits voor het instappen (ШДВв) en neerlaten (ШДВн) hutten, de contacten van de blokkeerrelais RBV en RBN zijn verbonden met de contacten van het selectieve sectionele circuit uitvoerende circuit .
In de diagrammen getoond in Fig. 1 en 2, bij afwezigheid van een cabine op de vloer, worden de spoelen van de inductieve sensor ID en het RIS-relais bekrachtigd. Daarom, wanneer u op de opdrachtopdrachtknop drukt of KV belt (ze worden in de aan-stand gehouden door de UM-vasthoudmagneten totdat ze worden overwonnen door de contacten van de mijndeuren op deze verdieping van de DSh), wordt er een circuit gevormd (niet weergegeven in afbeeldingen) waaronder het omhoog-stuurrelais RUV als de bestemmingsverdieping hoger is dan de vloer van de parkeergarage, of het omlaag-stuurrelais LVL als de bestemmingsverdieping onder de parkeergarage ligt.
Nadat de auto op de belvloer is aangekomen, wordt de ID van de inductieve sensor ontlucht, wordt het RIS-relais uitgeschakeld, waardoor de contacten worden geopend, waardoor het RUV- of RUN-relais en de LS-lamp worden uitgeschakeld (de auto stopt), en door het RIS4-contact te sluiten, wordt een circuit voorbereid voor de uitvoering van de opdracht die uit de auto komt.
In het volledige collectieve circuit wordt het circuit gedeeld door de contacten RIS1 en RIS2 op de vloer van de parkeerplaats van de auto niet alleen verbroken door deze contacten, maar ook door de contacten van het blokkeerrelais omhoog RBV of omlaag RBN (hun spoelen zijn niet weergegeven in het diagram), en de circuits voor heffen, dalen en ordenen zijn van elkaar gescheiden door scheidingsdioden D1 - D4.
Voor het indrukken van de bel- of bestelknop worden, als de rijrichting van het voertuig nog niet is geselecteerd, alle contacten in het rijrichtingkeuzecircuit gesloten, behalve de RIS4-contacten op de parkeerverdieping.Wanneer een van deze knoppen wordt ingedrukt, worden daarom de oproepsignalen van de verdiepingen boven de vloer van de parkeergarage verbonden met de relaisspoel RUN, en de oproepsignalen van de verdiepingen onder de parkeergarage omvatten het relais RUV. Nadat de richting is geselecteerd, gelijktijdig met het RUV- of LVL-relais, wordt een van de tegengestelde richting blokkerende relais RBV of RBN ingeschakeld, die de uitvoer onderbreekt via het sectiecircuit van niet-voorbijgaande oproepsignalen met zijn contacten.
In het schema getoond in Fig. 2, a, om de passagiers te laten zakken, gaat de cabine zonder te stoppen naar de hoogste verdieping van het gesprek en daalt dan met passerende stops, en in het diagram getoond in Fig. 2, b, als het nodig is om passagiers op te halen, gaat de cabine naar de laagste verdieping van de oproep en stijgt dan met passerende stops.
In de beschouwde schema's worden de selectors gemaakt op relaiselementen. Daarnaast worden andere selectors gebruikt: nok, foto-elektrisch, continue borstelvolging, stepping, op statische elementen, enz.
Bij grote passagiersstromen worden meerdere liften in één gang geïnstalleerd, die gecombineerde bediening hebben in paren of groepen om het comfort te vergroten en het vermogen te verbeteren. Het aantal liften dat in groepen is aangesloten, is meestal niet groter dan vier, maar vaker drie, hoewel er systemen bekend zijn die tot acht liften in een groep bevatten.
Bij groepsbesturing zijn er gewoonlijk drie hoofdmodi voor liftbediening: piekstijging, piekdaling en gebalanceerde beweging in beide richtingen. Activering van de liften voor een of andere modus wordt uitgevoerd door de verzender of automatisch door middel van de programmeerklok die voor elke groep liften is geïnstalleerd.
In hoogbouw is elke groep liften vast om een bepaald deel van de verdiepingen te bedienen, andere verdiepingen worden er niet door bediend. Als er meerdere liften in de groep zijn die een gebied of een laag gebouw bedienen, kunnen, om de gemiddelde bewegingssnelheid te verhogen door het aantal stops te verminderen, aparte liften worden toegewezen om de even en oneven verdiepingen te bedienen.
Om dubbele of groepsbesturing van liften uit te voeren, moeten hun besturingscircuits collectief zijn en moeten oproepen naar elke verdieping in beide richtingen afzonderlijk in elke richting worden geregistreerd door geschikte opslagapparaten met relais, transistors, enz.
Als een voorbeeld dat de werkingsdetails weergeeft bij gepaarde besturing van liften met extra parkeerrelais van de eerste lift 1PC en de tweede lift 2PC, beschouwen we een fragment van het schematische diagram getoond in Fig. 3.
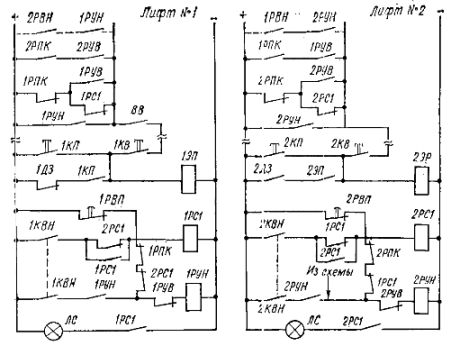
Rijst. 3. Fragment van een schematisch diagram van gekoppelde liftbesturing: ER - vloerrelais, RPK - kanaalschakelrelais, RVP automatisch startrelais
In dit geval beantwoordt de auto die met passagiers op de eerste verdieping is afgedaald geen oproepen van andere verdiepingen en wacht op passagiers. Als er geen auto op de eerste verdieping staat, wordt de auto die op bestelling is opgestaan en wordt vrijgegeven automatisch naar de eerste verdieping gestuurd, en als een andere auto wordt neergelaten of geparkeerd, blijft de laatste op de grond aan het einde van de vlucht of gaat naar het laadcentrum en wordt voornamelijk gebruikt voor oproepbediening in zinkrichting.
Het parkeerrelais 1PC1 of 2PC1 op de eerste verdieping wordt ingeschakeld na aankomst van de cabine op de eerste verdieping vanaf de eindschakelaar 1KVN of 2KVN (geïnstalleerd in de kopieermijnen). Deze relais zijn geblokkeerd.Daarom geeft de opname van een van hen aan dat deze auto eerder op de eerste verdieping arriveerde dan de andere. In dit geval schakelt relais 1PC1 of 2PC1 met zijn sluitcontact de LS-signaallamp in en verbreekt met zijn openingscontact het belcircuit van zijn lift, waardoor de oproep wordt onderbroken terwijl de auto op de eerste verdieping geparkeerd staat.
Wanneer de kooi de eerste verdieping verlaat, gaat de LS-signaallamp uit, de stroom naar de opgeroepen circuits van deze lift wordt hersteld onmiddellijk nadat de kooi is vrijgegeven en nadat de kooi van een andere lift op de eerste verdieping is aangekomen, wordt het computerrelais uitgeschakeld. Opgewonden. Deze cabine blijft op de begane grond en wacht op passagiers (wat wordt aangegeven door het branden van het LS-waarschuwingslampje). Wanneer de auto die tot bestelling is gestegen wordt vrijgegeven en er geen oproepen zijn, wordt een signaal verzonden naar het circuit dat de relaisspoelen 1RUN of 2RUV 1RUN of 2RUV inschakelt via de openingscontacten van de eindschakelaar 1KVN of 2KVN, en de auto gaat naar de eerste verdieping, en t .n.
De motorbesturingsapparatuur van typische liften met enkele, dubbele en groepsbesturing bevindt zich meestal op typische panelen, stations of besturingseenheden die in machinekamers zijn geïnstalleerd.