Gesloten automatische besturingssystemen
 Gesloten automatische besturingssystemen (ACS) verschillen van open circuits in de gebruikte apparatuur en in de volledigheid van automatisering. Met de ACS open ontvangt de hoofdunit (inclusief de besturingsapparatuur) geen informatie over de actuele bedrijfsmodus van de elektrische installatie (aandrijvende motor, draaiende machine).
Gesloten automatische besturingssystemen (ACS) verschillen van open circuits in de gebruikte apparatuur en in de volledigheid van automatisering. Met de ACS open ontvangt de hoofdunit (inclusief de besturingsapparatuur) geen informatie over de actuele bedrijfsmodus van de elektrische installatie (aandrijvende motor, draaiende machine).
In een gesloten ASUB wordt informatie verzonden naar de bedieningselementen, wat gepaard gaat met het indienen van geschikte commandosignalen. Het circuit dat dergelijke informatie verzendt, sluit de regellus en vormt een gesloten ACS of feedback ACS.
Het verschil tussen gesloten en open ACS kan worden verklaard aan de hand van het voorbeeld van het regelen van de snelheid van een elektromotor in een generator-motor (G-D) systeem. Met de ACS open (fig. 1, a), wordt de ingestelde snelheid van de elektromotor handmatig ingesteld met potentiometer P. De snelheidsaanpassing wordt visueel uitgevoerd door een toerenteller, die wordt aangedreven door de TG-tachogenerator. Elke snelheidsafwijking van het instelpunt wordt door de operator geëlimineerd door op de potentiometerschuif te werken.
In een gesloten ACS (fig.1, b) het anker van de TG-tachogenerator is opgenomen in het excitatiecircuit van de OVG-generator, waardoor een gesloten of feedbacksysteem ontstaat (in dit geval met snelheidsfeedback).
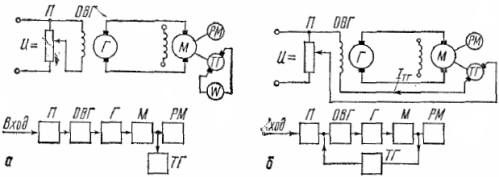
Rijst. 1. Elektromotorbesturingscircuit in het G -M-systeem: a — open ACS, b — gesloten ACS
De stroom gegenereerd door de tachogenerator (Aztg) in een gesloten circuit gericht op de stroom van de potentiometer (Azn) en de resulterende stroom werkt in het circuit gelijk aan het geometrische verschil van deze stromen. Met behulp van de schuifregelaar van de potentiometer stelt de operator de waarde in van de resulterende stroom in de excitatiespoel van de OVG, waarbij de overeenkomstige snelheid van de elektromotor wordt geleverd. Hier eindigt de rol van de operator. In de toekomst handhaaft het systeem automatisch met een zekere nauwkeurigheid de ingestelde bedrijfsmodus van de elektrische aandrijving.
Stel dat als gevolg van de belastingspiek het toerental van de elektromotor is afgenomen ten opzichte van het opgegeven toerental. De verlaging van de snelheid gaat gepaard met een overeenkomstige verlaging van de snelheid van de tachogenerator en de spanning op de klemmen. Dit zal op zijn beurt leiden tot een afname van de stroom Aztg in het feedbackcircuit en in een bepaalde positie van de schuifregelaar van de potentiometer - een toename van de resulterende stroom in de bekrachtigingswikkeling van de generator. De generatorspanning en het motortoerental nemen dienovereenkomstig toe.
Het proces van toenemende snelheid en spanning gaat door totdat de stroom in de feedbacklus de ingestelde waarde bereikt en het motortoerental de ingestelde waarde bereikt.
Bij de analyse van automatische controlesystemen, functiekaarten… In afb.2 transmissies functioneel schema van ACS, dat de volgende elementen bevat:
1 — hoofdapparaat dat de werkingsmodus instelt, een commando, startpuls of signaal geeft,
2 — vergelijkingselement. Het bevat het signaal X1 van de master, het signaal X0, dat de snelheid of het niveau van de geregelde waarde bepaalt. Rekening houdend met het signaal van het negende hoofdterugkoppelingselement, vergelijkt element 2 de ontvangen signalen en verzendt het aanvullend gecorrigeerde signaal X2,
3 - het transformerende element, het signaal op transformeert het in een andere vorm, handiger voor verdere verzending. Het signaal X2 wordt bijvoorbeeld geleverd in de vorm van hydraulische (pneumatische, mechanische) druk en element 3 zet dit om in een elektrische stroom. Aangezien voor dit soort transformatie mogelijk extra energie nodig is, wordt element 3 aangesloten op een PE-energiebron,
4 - toevoegend element, het ontvangt twee signalen: X3 en X8 van het correctie-element (geheugenelement) 8. Deze signalen worden opgeteld door element 4 en verzonden naar het volgende element,
5 — versterkend element, het ingangssignaal X1 kan zwak zijn en moet worden versterkt voor latere verzending. Dit gebeurt via element 5 dat is aangesloten op de PE-stroombron,
6 — uitvoerend element, voert het ontvangen signaal uit (elektromotor, elektromagnetisch relais, servomotor),
7 - verstelbaar object of werkende machine.
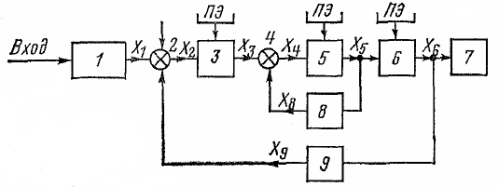
Rijst. 2. Functioneel diagram van ACS
Elk automatiseringselement is een energieomzetter, aan de ingang waarvan de waarde X' wordt toegepast en de waarde X wordt verwijderd uit de uitgang. «Voor elk element in een stationaire toestand is er een zekere afhankelijkheid X» (X'), een statische eigenschap genoemd.
Een gesloten automatisch regelsysteem kenmerkt zich door de aanwezigheid van feedback; het heeft ten minste één feedbacklus die de uitvoer van het systeem verbindt met zijn invoer. Daarnaast kan er sprake zijn van zogenaamde interne terugkoppeling, waarbij de uitvoer en invoer van afzonderlijke ACS-elementen met elkaar worden verbonden.
Feedback is onderverdeeld in hard en flexibel. Harde beperkingen werken zowel in tijdelijke als stationaire werkingsmodi van het systeem, flexibel - alleen in tijdelijke. Maak onderscheid tussen positieve en negatieve feedback. Naarmate de gereguleerde waarde toeneemt, neemt de positieve verbinding deze nog meer toe, en de negatieve daarentegen neemt af. Feedbacks kunnen signalen verzenden die evenredig zijn met de rotatiehoek, snelheid, spanning, stroom, enz. en worden dienovereenkomstig hoek-, snelheids-, spannings- en stroomterugkoppelingen genoemd. Zie hier voor meer informatie: Elementen van automatiseringssystemen
Volgens het werkingsprincipe kan ACS in drie groepen worden verdeeld:
-
continubedrijf waarbij de relatie tussen de geregelde en ingestelde waarden niet verbroken wordt,
-
impulsactie, waarbij de verbinding tussen de geregelde en de ingestelde waarden met regelmatige tussenpozen plaatsvindt,
-
relaisactie waarbij communicatie alleen plaatsvindt wanneer een waarde een bepaalde waarde bereikt.
Afhankelijk van de wet volgens welke een bepaalde waarde in de loop van de tijd verandert, kan ACS ook in drie groepen worden verdeeld:
-
systemen met constant of laag setpoint waarbij de automatisch geregelde waarde constant wordt gehouden. Dit zijn stabilisatiesystemen, die in wezen automatische controlesystemen (ACS) zijn,
-
systemen waarbij de doelwaarde wordt gewijzigd volgens een specifiek, vooraf bepaald programma. Het is een softwarebeheersysteem,
-
systemen waarin een gegeven waarde sterk en volgens een willekeurige wet kan variëren, d.w.z. volgsystemen.