Basisparameters en kenmerken van elektromagnetische relais
 Een elektrisch apparaat dat de relaisbesturingswet toepast, wordt een relais genoemd... In een relais, wanneer de besturingsparameter (invoer) soepel wordt gewijzigd in een bepaalde ingestelde waarde, verandert de gecontroleerde (uitvoer) parameter abrupt. Ook moet ten minste één van deze parameters elektrisch zijn.
Een elektrisch apparaat dat de relaisbesturingswet toepast, wordt een relais genoemd... In een relais, wanneer de besturingsparameter (invoer) soepel wordt gewijzigd in een bepaalde ingestelde waarde, verandert de gecontroleerde (uitvoer) parameter abrupt. Ook moet ten minste één van deze parameters elektrisch zijn.
Actie van functionele organen elektromagnetisch relais kan worden getraceerd volgens het diagram in Fig. 1. Het ontvangende lichaam A zet de aan de spoel 2 van de magnetische schakeling 1 geleverde ingangswaarde (spanning) Uin om in een tussenwaarde, d.w.z. in de mechanische kracht van het anker 3. De mechanische kracht van het anker FЯ werkt op het contactsysteem van het uitvoerende orgaan B. De tussenwaarde — de kracht van het anker FЯ, is evenredig met de invoerwaarde Uin, wordt vergeleken met een gegeven waarde van de kracht Fpr ontwikkeld door de veer 9 van het tussenlichaam B. Wanneer Uin <Uav, Fya
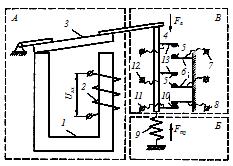 Rijst. 1 Schema van het elektromagnetische relais
Rijst. 1 Schema van het elektromagnetische relais
Tijdens het bedrijf onderscheidt het elektromagnetische relais op een tijdschaal vier fasen: de periode (tijd) van activering tav, de werkperiode twork, de periode (tijd) van uitschakeling tooff, de periode (tijd) van rust tp (Fig. 2).
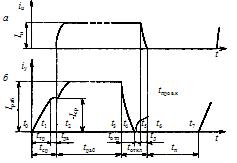
Rijst. 2. Afhankelijkheid van de hoeveelheden output (a) en output (b) van de tijd
Activeringstijd van een elektromagnetisch relais
 De responsperiode omvat het tijdsinterval vanaf het moment dat het ingangssignaal de bewakingsinstantie begint te beïnvloeden totdat het signaal in het gecontroleerde circuit verschijnt. Het segment van de abscis-as tav = t2 –t0 komt overeen met deze periode in Fig. 2, geb. Op het moment t0 neemt de stroom in de relaisspoel toe tot een waarde waarbij de elektromagnetische kracht Fe die op het anker inwerkt, de veerkracht Fm (mechanische kracht) van het tussenlichaam begint tegen te werken. De invoerwaarde wordt dan de acceptatiewaarde genoemd.
De responsperiode omvat het tijdsinterval vanaf het moment dat het ingangssignaal de bewakingsinstantie begint te beïnvloeden totdat het signaal in het gecontroleerde circuit verschijnt. Het segment van de abscis-as tav = t2 –t0 komt overeen met deze periode in Fig. 2, geb. Op het moment t0 neemt de stroom in de relaisspoel toe tot een waarde waarbij de elektromagnetische kracht Fe die op het anker inwerkt, de veerkracht Fm (mechanische kracht) van het tussenlichaam begint tegen te werken. De invoerwaarde wordt dan de acceptatiewaarde genoemd.
De beginperiode komt overeen met het segment ttr = t1 — t0. Op tijdstip t1 begint het anker van de relaiselektromagneet te bewegen. Gedurende tdv = t2 — t1 beweegt het anker, overwint de weerstand van het tussenlichaam B (zie figuur 1) en activeert het uitvoerend lichaam C.
Aan het einde van de ankerslag sluiten de aandrijfcontacten, de belastingsstroom in (Fig. 2, a) begint te stijgen van nul tot een evenwichtswaarde. De ingangswaarde waarbij de regeling van het uitgangscircuit begint, wordt de acceptatiewaarde (Iav) genoemd. Het vermogen Psr dat overeenkomt met Isr wordt het aandrijfvermogen genoemd.
Responstijd t cf = ttr + tdv.
De reactietijd van elektromagnetische relais varieert van 1-2 tot 20 ms. Elektromagnetische tijdrelais zorgen voor een vertraging van maximaal 10 s.
Om de reactietijd van het relais te schatten, is het toegestaan om de uitdrukking te gebruiken
t cf = t1kz-bm –a,
waarbij t1 de reactietijd is voor een gegeven veiligheidsfactor ks en factor m = 1; a, b — coëfficiënten die worden bepaald afhankelijk van het type relais en de waarden van kz en m.
Voor hogesnelheidsrelais bij kz = 1,5¸2 benadert de waarde van de coëfficiënt a de eenheid. Voor gewone relais met k z = 1,5¸3, de waarde a = 0,25¸0,95, ligt de waarde van de coëfficiënt b meestal in het bereik van 1,4-1,6.
Bedrijfsduur van het elektromagnetische relais
 De werkperiode omvat het tijdsinterval twork = t3 — t2, d.w.z. de tijd vanaf het moment van aansturing van de uitgangsschakeling t2 tot het moment van beëindiging van de inslag op het gevoelige orgaan van het ingangssignaal t3. De stroom begint te stijgen tot een stationaire waarde van Iwork (Fig. 2, b) - dit is de werkwaarde van de ingangswaarde, die een betrouwbare werking van het relais garandeert.
De werkperiode omvat het tijdsinterval twork = t3 — t2, d.w.z. de tijd vanaf het moment van aansturing van de uitgangsschakeling t2 tot het moment van beëindiging van de inslag op het gevoelige orgaan van het ingangssignaal t3. De stroom begint te stijgen tot een stationaire waarde van Iwork (Fig. 2, b) - dit is de werkwaarde van de ingangswaarde, die een betrouwbare werking van het relais garandeert.
De verhouding Iwork / Icr = kz wordt de factor veiligheid op het werk genoemd.
Om de overbelastingscapaciteit van het gevoelige element van het relais te karakteriseren, wordt de waarde van de ingangshoeveelheid gebruikt, die de grenswaarde van de bedrijfshoeveelheid Ioperating.max wordt genoemd.
Beperking van de werkwaarde - dit is de waarde die het gevoelige orgaan gedurende een korte genormaliseerde periode kan weerstaan. De waarde van deze waarde is echter onaanvaardbaar wanneer het relais in de normale modus werkt vanwege de toestand van elektrische of mechanische sterkte of verwarming.
Het regelvermogenconcept Ru wordt gebruikt om het draagvermogen van de relaisaandrijving te karakteriseren. Stuurvermogen is het vermogen in het bestuurde circuit dat de omvormer gedurende lange tijd kan uitzenden.
Uitschakelperiode elektromagnetische relais
 De uit-periode bevat het tijdsinterval toff = t6 — t3, d.w.z. de tijd vanaf het moment waarop de impact op het waarnemende orgaan t3 stopt tot het moment waarop de stroom in het gecontroleerde circuit tot nul afneemt (Fig. 16, a).
De uit-periode bevat het tijdsinterval toff = t6 — t3, d.w.z. de tijd vanaf het moment waarop de impact op het waarnemende orgaan t3 stopt tot het moment waarop de stroom in het gecontroleerde circuit tot nul afneemt (Fig. 16, a).
De uit-periode omvat de vrijgaveperiode totp = t4 — t3 waarin het relais uit is. De stroom iy in de relaisspoel zakt naar nul (Fig. 2, b). Gedurende deze periode is de tegengestelde veerkracht (mechanische kracht) groter dan de elektromagnetische kracht, d.w.z. Fm> Fe en het anker wordt vrijgegeven.
Na het selecteren van een contactfout (interval tc = t5 - t4), openen de relaiscontacten en wordt er een boog tussen ontstoken, die dooft na tijd td = t6 - t5. Gedurende de periode td neemt de stroom in het bestuurde circuit af van In naar nul (Fig. 2, a).
Uitschakeltijd t t = tp + tc + td.
De uitschakelperiode wordt gekenmerkt door een herstelfactor, die de verhouding is van de valstroom Iotp tot de opneemstroom Iav: kv = Iotp / Icr.
Typisch, voor vermogenssysteembeveiligingsrelais en stuurrelais die de ingangsparameter binnen nauwe grenzen regelen, moet kv dichter bij de eenheid liggen.
Rustperiode van het elektromagnetische relais
De rustperiode is het tijdsinterval tp = t7 — t6.
De latentieperiode wordt gekenmerkt door een parameter die de inactieve waarde wordt genoemd, wat de grootste waarde is van de invoerhoeveelheid die ervoor zorgt dat het relais niet werkt of wordt vastgehouden. De uitschakeltijd is korter dan de operationele opstarttijd en de releasetijd.
De verhouding tussen regelvermogen en aandrijfvermogen wordt versterking genoemd, ku = Py / Pcr.
Het aantal starts per tijdseenheid wordt bepaald door een waarde die omgekeerd evenredig is met de cyclustijd:
f = 1 / tq = 1 / (Tsrab +Trob + Toff +TNS)
Lakota OB