Effect van elektrische motorbelasting op efficiëntie en vermogen
Gangreserve in het algemeen of onderbelasting van de elektromotor veroorzaakt verslechtering van efficiëntie en vermogen. Soms is het nodig om de werkelijke waarden van deze coëfficiënten te kennen om de waarden van het actieve en reactieve vermogen te bepalen dat door de elektromotor uit het netwerk wordt verbruikt.
Het rendement van elektromotoren bij belastingen lager dan nominaal kan worden bepaald met de formule:
waarbij ηnom het nominale rendement van de elektromotor is.
Gebruik de formule om β te bepalen:

waarbij Kz de verhouding is tussen de werkelijke belasting en de nominale belasting (belastingsfactor);
α — coëfficiënt aangenomen gelijk aan:
• voor gelijkstroommotoren met seriebekrachtiging - van 0,5 (voor lage snelheid) tot 1 (voor hoge snelheid);
• voor elektromotoren met parallelle excitatie - van 1 (voor lage snelheid) tot 2 (voor hoge snelheid);
• voor asynchrone elektromotoren — van 0,5 tot 1; voor kraan- en synchrone elektromotoren — tot 2.
De waarden krachtfactor asynchrone motor is afhankelijk van veel factoren en is strikt genomen voor elke elektromotor anders, zelfs voor hetzelfde type.
Onder ontwerpomstandigheden is het echter voldoende om alleen de geschatte gemiddelde waarden van de arbeidsfactor te kennen, afhankelijk van de verwachte belastingen.
Uit een vereenvoudigd cirkeldiagram wordt de volgende relatie verkregen:

Benamingen — zie afb. 1.
waarbij tanφ1, de tangens is van de fasehoek die overeenkomt met de werkelijke belasting van de elektromotor P1, kW; tanφnom — de tangens van de faseverschuivingshoek die overeenkomt met de nominale belasting van de elektromotor PH0M (bepaald door cosφnom gespecificeerd in het motorpaspoort); σ-verhouding van het kantelmoment tot het nominale (ligt binnen de enge grenzen van 1,8-2);

K3 — belastingsfactor.
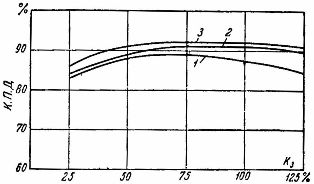
Rijst. 1. Efficiëntiecurven van asynchrone verschillende elektromotoren afhankelijk van de belasting.
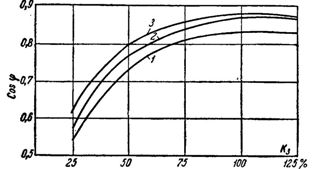
Rijst. 2. Curven van de vermogensfactor van asynchrone elektromotoren afhankelijk van de belasting.
De krommen van de afhankelijkheid van η en cosφ van de belasting voor de meest voorkomende typen asynchrone elektromotoren worden gegeven in Fig. 1 en 2.