De selectie van een asynchrone elektromotor voor gebruik in de modus van dynamisch remmen door zelfexcitatie
 Asynchrone elektromotor met een gewonden rotor met het eenvoudigste regelschema - de opname van weerstand in het rotorcircuit heeft extreem lage regeleigenschappen. Daarom werden er, voordat er frequentieomvormers op de markt kwamen, verschillende schema's ontwikkeld om lagere snelheden in de step-down-modus te verkrijgen.
Asynchrone elektromotor met een gewonden rotor met het eenvoudigste regelschema - de opname van weerstand in het rotorcircuit heeft extreem lage regeleigenschappen. Daarom werden er, voordat er frequentieomvormers op de markt kwamen, verschillende schema's ontwikkeld om lagere snelheden in de step-down-modus te verkrijgen.
Eigenlijk zijn dat er niet zoveel. In het buitenland werd het gebruik van een extra elektrische machine - een wervelrem gemonteerd op dezelfde as als de hoofdmotor - wijdverbreid. Met het schema kunt u voldoende stijve mechanische eigenschappen krijgen bij het laten zakken van de last, maar zo'n elektrische aandrijving heeft extreem lage energiekarakteristieken (remenergie komt vrij in de wervelrem). Bovendien heeft de vortexrem vrij hoge kosten en bemoeilijkt hij de lay-out van het mechanische onderdeel enorm.
Daarom heeft een ontwerpteam onder leiding van E.M. Pevzner introduceerde zelfopgewekt dynamisch remmen.
Een dergelijke elektrische aandrijving wordt veel gebruikt in huishoudelijke kranen (panelen van het type TSD, TSDI, KSDB voor brug-, portaal- en portaalkranen, bedieningspanelen voor torenkranen KB-309, KB-403, KB-404, KB-405, KB - 406, KB-408, KB-415, KB-415-07, KB-473, KBM-401P.). We hebben het dus over tienduizenden kranen in bedrijf.
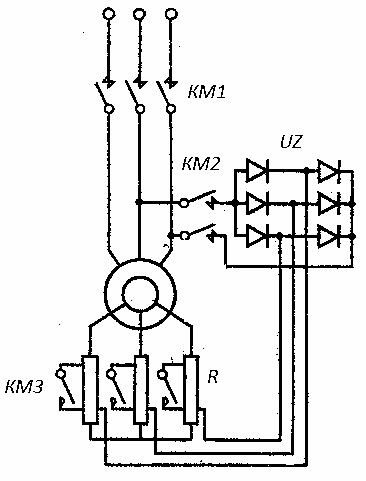
Rijst. 1. Schema van opname van een asynchrone motor in dynamische remmodus door zelfexcitatie
Het principe van dynamisch remmen met zelfexcitatie is als volgt:
Het rotorcircuit omvat driefasige gelijkrichter UZ (afb. 1). De elektromotor is losgekoppeld van het netwerk via de schakelaar KM1. De gelijkgerichte spanning is verbonden met de statorwikkeling via de schakelaar KM2. Magneetschakelaarcontacten KM3 zijn gesloten. Wanneer de rem wordt losgelaten (niet weergegeven in het diagram), begint de motoras te draaien onder invloed van het vallende gewicht.
In de rotorwikkeling wordt een EMF geïnduceerd, onder invloed waarvan een stroom begint te lopen in het rotor-statorcircuit. De motor ontwikkelt het remkoppel, de last wordt met een constante snelheid neergelaten. De snelheidswaarde wordt bepaald door de weerstandswaarde van het rotorcircuit. Hoe groter de weerstand, hoe sneller de daalsnelheid. Om de snelheid te verhogen, wordt schakelaar KM3 uitgeschakeld.
In dynamische remmodus met zelfexcitatie verbruikt de elektrische aandrijving alleen stroom van het netwerk om de hydraulische remduwer en relaisschakelaars van stroom te voorzien. Als voorbeeld, Afb. 7 toont de mechanische eigenschappen van een elektrische aandrijving met een TSD-paneel.
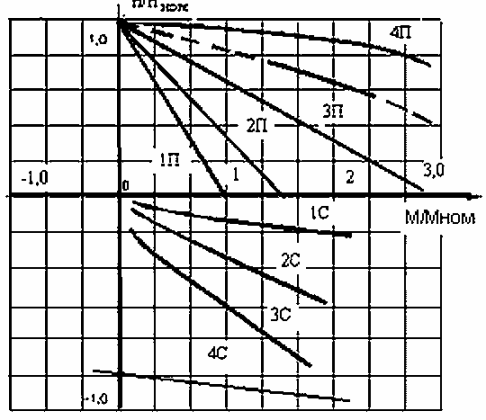
Rijst. 2. Mechanische kenmerken van de elektrische aandrijving van het hefmechanisme met het TSD-paneel
Dynamische remeigenschappen worden aangeduid als 1C, 2C, 3C. Het is te zien dat de kenmerken voldoende hardheid hebben. De snelheidsaanpassing wordt uitgevoerd in het bereik van 1: 8, wat in de meeste gevallen voldoende is voor massakranen.
De voorwaarde voor zelfexcitatie van de elektromotor is:
Waar x '2- inductieve weerstand van de rotorwikkeling, Ohm; хо- inductieve weerstand van het magnetiserende circuit. Om
Waar ks — coëfficiënt van de regeling
kd - reductiecoëfficiënt van de rotorstroom naar de statorstroom; kcx - correctiecircuitcoëfficiënt, voor een driefasig brugcircuit kx = 0,85; kt is de transformatiecoëfficiënt van de motor van stator naar rotor
Coëfficiënt kd hangt af van het aansluitschema van de statorwikkelingen, die zijn aangesloten op een ster in huishoudelijke kraanmotoren bij een netspanning van 380 V.
Coëfficiënt kt hangt af van de transformatiecoëfficiënt, d.w.z. van de verhouding tussen statorspanning en rotorspanning, die afhangt van het motortype. Zo zijn voor verschillende elektromotoren van de MT- en 4MT-serie de waarde en bijbehorende parameters getabelleerd. 1.
Tafel 1.
Type elektromotor vermogen, kWt Rotorspanning, V kt x x '2 xho √(1 + 2x '2/ho) MTN412-6 30 255 1,5 1,3 0,173 3,74 1,04 4MTN225L6 55 290 1,31 1,31 0,197 3,73 1,05 MTN512-6 55 340 1,11 0,98 0,197 3,8 1,05 4MTN280L10 75 308 1,23 1,06 0,146 2,33 1,06 4MTN280M6 110 420 0,9 0,7 0,083 2,98 1,02
Voorwaarde кс ≥ √(1 + 2х '2/хо) wordt uitgevoerd voor motoren van het type MTN412-6, 4MTN225L6, die "opgewonden" kunnen worden genoemd. Dergelijke elektromotoren komen in de zelfexcitatiemodus zonder aanvullende circuitbeslissingen te nemen. In complete laagspanningsapparaten (laagspanningsschakelaars of bedieningspanelen) die zijn ontworpen om samen te werken met dergelijke motoren, wordt echter een kleine initiële bekrachtiging geleverd voor een betrouwbare werking.
De initiële excitatie wordt uitgevoerd door een constante door te geven, de zogenaamde Een kleine waarde van "voedingsstroom" (meestal niet meer dan 10% van de nominale stroom van de motor) van een enkelzijdige gelijkrichter. Voor bekrachtigde motoren is dit in ieder geval voldoende voor een betrouwbare overgang naar de zelfbekrachtigde dynamische remmodus.
Elektromotoren MTN512-6, 4MTN280M6, waarvoor niet aan de voorwaarde кс ≥ √(1 + 2х '2/хо) wordt voldaan, zijn "niet enthousiast". Dit betekent niet dat dergelijke motoren niet kunnen werken in dynamische remmodus met zelfexcitatie, maar de waarde van de extra stroom die daarvoor nodig is, bereikt 50% van de nominale stroom van de stator.Dit vereist het gebruik van speciale NKU (controlepanelen) voor niet-bekrachtigde elektromotoren. …
Elektromotortype 4MTN280L10 met кс = √(1 + 2х '2/хо) bevindt zich op de limiet van zelfexcitatie en elke willekeurige verandering in de parameters kan de zelfexcitatieconditie schenden. Daarom kan een dergelijke motor ook als niet-exciteerbaar worden geclassificeerd.
De belangrijkste parameters die van invloed zijn op het vermogen van de elektromotor om zichzelf op te wekken, zijn de nominale spanning van de rotor E2nom. De kritische waarde van E2nom, waarbij zelfexcitatie niet optreedt zonder een grote voedingsstroom, moet worden genomen als 300 V.
Met deze eigenschap van de zelfexciterende dynamische remmodus werd rekening gehouden door de Dynamo-fabriek en Sibelektromotor PO bij de ontwikkeling van een reeks 4MT-kraanelektromotoren in de vroege jaren tachtig.
Met name de E2nom-waarde voor sommige elektromotoren is verlaagd in vergelijking met de vorige MT-serie om de motoren prikkelbaar te maken.
Voor de 4MTN225L6-elektromotor, die veel wordt gebruikt bij de elektrische aandrijving van torenkranen, werd E2nom bijvoorbeeld verlaagd in vergelijking met de vorige motor uit de MTN512-6-serie van 340 naar 290 V, waardoor de motor zelfbekrachtigd werd. Later startte OJSC "Sielectromotor" met de productie van elektromotor 4MTM225L6 met dezelfde parameters.
Na verloop van tijd begonnen andere fabrikanten elektromotoren met een soortgelijk doel te produceren.
De Rzhevsky Crane Construction Plant produceert de MKAF225L6 elektromotor, de Siberian Electrotechnical Company produceert de 4MTM225L6 PND elektromotor.Ondanks het uiterlijk dat verschilt van het prototype met betrekking tot de technologische mogelijkheden van elk van de fabrikanten, hebben al deze elektromotoren dezelfde elektrische parameters en installatie-afmetingen en zijn ze volledig uitwisselbaar.
Door het verschil in de namen van de motoren kan de gebruiker een weloverwogen keuze maken voor de ene of de andere fabrikant, geleid door zijn eigen voorkeuren, prijs, levertijd, enz. En wees er tegelijkertijd absoluut zeker van dat het vervangen van een elektromotor van de ene kraanfabrikant door een elektromotor van een andere fabrikant niet zal leiden tot een storing van de kraan of een ongeval.
In het afgelopen decennium zijn er echter elektromotoren van verschillende fabrikanten op de binnenlandse markt verschenen, waarvan het merk exact het merk reproduceert van de "originele" elektromotor geproduceerd door JSC "Sielectromotor". Aangenomen kan worden dat de oorsprong van elektromotoren verband houdt met de grote oosterbuur van ons land. Hun prijs is iets lager dan die van traditionele fabrikanten, dus de interesse in hen vanuit de leveringen van ondernemingen is begrijpelijk.
Dus door een elektromotor te bestellen voor installatie op een gefabriceerde kraan of door een beschadigde elektromotor op een kraan te vervangen door een werkende, kunt u een elektromotor van een onbekende fabrikant krijgen, met een E2nom die verschilt van het prototype van de elektromotor.
De situatie doet een beetje denken aan begin jaren 90, toen verschillende popgroepen met dezelfde naam tegelijkertijd door het land toerden.
Laten we er nogmaals aan herinneren dat de verhouding E2nom / I2nom de belangrijkste parameter is van een motor met een gewonden rotor, die van invloed is op de keuze van startweerstanden, relais-magneetschakelaarapparatuur en, zoals hierboven vermeld, op de voorwaarde van zelfexcitatie van de elektrische motor.
Vaak staan er echter helemaal geen rotorgegevens op de typeplaatjes van gekloonde motoren. Hier is een voorbeeld:
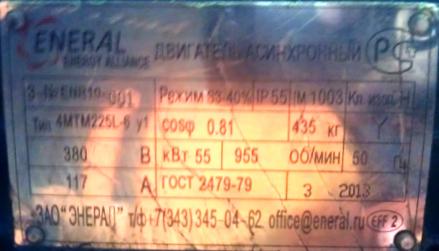
Rijst. 3. Naamplaatje asynchrone motor rotorkraan
Overigens had deze elektromotor de «juiste» waarde E2nom, alleen moest die nu empirisch worden bepaald.
In de catalogi van andere fabrikanten voor de elektromotor 4MTM225L6 wordt de waarde E2nom = 340 V aangegeven, d.w.z. de opgewonden motor werd een onopgewonden motor. Het gevolg van het gebruik van een dergelijke elektromotor als onderdeel van een elektrische aandrijving met dynamisch remmen met zelfexcitatie is een belastingsdaling en scheiding van de elektromotor met mechanische vernietiging van de rotor- en statorwikkelingen.
Het is precies dit beeld dat de auteur onlangs waarnam in een van de oudste Russische machinebouwbedrijven, waar een nieuwe brugkraan met een gekloonde elektromotor van het type 4MTM225L6 met E2n = 340 V werd afgeleverd. lijden. Daarnaast herstelt de eigenaar van de kraan de motor drie (!) keer na ontwijken.
Een andere fabrikant van gekloonde elektromotoren, die blijkbaar herhaaldelijk soortgelijke ongevallen heeft meegemaakt, produceert nu twee elektromotoren onder hetzelfde merk (!). De ene met E2nom = 340 V, de andere met E2nom = 264 V staat in de catalogus vermeld met de opmerking: "voor type KB-aftakkingen", d.w.z. torenkranen.
Zo'n motor wordt inderdaad het meest gebruikt op torenkranen, maar wordt ook op brugkranen gemonteerd. Zo hoor je de dialoog tussen de leverancier en de klant: “Voor welke kraan heb je een motor nodig? Voor de vloer. Neem dan deze (E2nom = 340 V). » En in de aandrijving van de elektrische takels zit een bedieningspaneel met zelfbekrachtigd dynamisch remmen. Het resultaat is hierboven beschreven.
Tegelijkertijd zegt niemand dat deze elektromotoren defect of onbetrouwbaar zijn en niet op kranen kunnen worden gebruikt. Hoe meer keuzes op de markt, hoe beter. Zoals ze zeggen, er zijn meer goede en verschillende motoren. Het is alleen dat hun merk de consument misleidt, wat gevaarlijke gevolgen kan hebben.
Om een elektromotor met andere rotorparameters dan het prototype te gebruiken, moet u:
-
Meet E2nom wanneer het rotorcircuit open is en de statorwikkeling is aangesloten op het net;
-
Op basis van E2nom metingen ballastweerstanden berekenen, selecteren en bestellen;
-
Kies een bedieningspaneel voor niet-exciterende elektromotoren uit de catalogus en bestel deze.
Of u kunt eenvoudig naar de waarde van E2nom vragen voordat u een motor bestelt die aantrekt met zijn prijs en dit specifiek in het contract afspreken. Dit sluit echter de meting van E2nom tijdens de ingangsbesturing van de bestelde motor niet uit.
Samenvattend kunnen we de volgende conclusies trekken:
-
Bij de elektrische aandrijving van huishoudelijke kranen op basis van faserotor-elektromotoren wordt veel gebruik gemaakt van zelfbekrachtigd dynamisch remmen. Er zijn tienduizenden van dergelijke elektrische aandrijvingen in gebruik. Ze worden nog steeds uitgegeven.
-
Om in zelfbekrachtigde dynamische remmodus te werken, moet de elektromotor een bepaalde E2nom / I2nom-verhouding hebben.
-
De belangrijkste voorwaarde voor zelfexcitatie van een elektromotor met een gewikkelde rotor is de waarde van E2nom ≤ 300 V.
-
Het gebruik van elektromotoren met E2nom > 300 V met bedieningspanelen die zijn ontworpen voor geëxciteerde elektromotoren kan ertoe leiden dat de belasting wegvalt en de elektromotor onherstelbaar beschadigd raakt.