De belangrijkste werkingsmodi van de elektromotor in het elektrische aandrijfsysteem
 Een volledig beeld van de werking van elke elektrische aandrijfmotor wordt verkregen door de mechanische kenmerken te onderzoeken die zijn uitgezet in vier kwadranten van een rechthoekig coördinatensysteem (fig. 1). Deze kenmerken komen overeen met twee hoofdmodi van de elektromotor: motor en rem.
Een volledig beeld van de werking van elke elektrische aandrijfmotor wordt verkregen door de mechanische kenmerken te onderzoeken die zijn uitgezet in vier kwadranten van een rechthoekig coördinatensysteem (fig. 1). Deze kenmerken komen overeen met twee hoofdmodi van de elektromotor: motor en rem.
Motormodus wordt zo'n werkingsmodus van de elektromotor genoemd, waarbij deze het werkmechanisme aandrijft. In de remmodus is de drijvende kracht het mechanisme en de motor compenseert deze kracht of vertraagt.
Afhankelijk van de bedrijfsmodus veranderen de richting van het koppel en het toerental. Neem voor de positieve richtingen van het toerental en het koppel van de elektromotor:
1) met verticale beweging - de draairichting van de elektromotor bij het heffen van de last en het koppel voor het geval dat de elektromotor werkt om de last op te tillen,
2) met horizontale beweging, bijvoorbeeld voor verschillende soorten karren, een van de bewegingsrichtingen van het mechanisme (vooruit, rechts) en het koppel ontwikkeld door de motor die overeenkomt met deze beweging. De momenten die door de motor worden overwonnen, zijn in dit geval negatief.
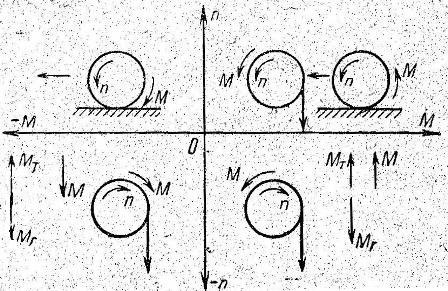
Rijst. 1. Afbeelding van de bedrijfsmodi van de aandrijfmotor in rechthoekige coördinaatassen
Zoals je kunt zien op afb. 1, in het eerste kwadrant van het coördinatensysteem, werkt de elektromotor in de motormodus (bijvoorbeeld bij het heffen van een last of het verplaatsen van een kar). Het tweede kwadrant komt overeen met de werkingsmodus van de elektromotor tijdens horizontale beweging van het mechanisme met remmen, wanneer de elektromotor een remmoment creëert dat de beweging van de as van het mechanisme tegenwerkt.
Het derde kwadrant beschouwt het geval van de elektromotor die werkt bij het laten zakken van een lichte last, wanneer het lastmoment het wrijvingsmoment in het mechanisme en de tandwielen niet kan overwinnen, en de elektromotor helpt de last te laten zakken, waarbij een motorkoppel wordt ontwikkeld dat overeenkomt met de richting van beweging van de last, maar tegengesteld aan het moment waarop de last wordt gehesen.
Ten slotte verwijst het vierde kwadrant naar het geval van motorrotatie onder invloed van een extern koppel. Deze modus kan zich bijvoorbeeld voordoen bij het neerlaten van zware lasten, wanneer de elektromotor een remkoppel ontwikkelt, de last vasthoudt en voorkomt dat de snelheid van het hefmechanisme toeneemt. In dit geval heeft het motorkoppel een positief teken, omdat het op dezelfde manier wordt gericht als bij het heffen.