Statische belastingen op motoren van hoofdkraanmechanismen
Het vermogen en koppel van de motoras van de kraantakel in de statische modus van het hijsen van de last kan worden berekend met de formules
waarbij P het motorasvermogen is, kW; G is de kracht die nodig is om de last op te tillen, N; G0 — hefkracht van de grijpinrichting, N; M is het moment van de motoras, Nm; v is de snelheid waarmee de last wordt opgetild, m / s; D is de diameter van de sleepliertrommel, m; η — efficiëntie van het hefmechanisme; i is de overbrengingsverhouding van de versnellingsbak en kettingtakel.
In de daalmodus ontwikkelt de kraanmotor een vermogen dat gelijk is aan het verschil tussen het wrijvingsvermogen Ptr en het vermogen als gevolg van de werking van het gewicht van de dalende last Pgr:
Bij het neerlaten van middelzware en zware lasten wordt de energie van de aandrijfas naar de motor geleid omdat Pgr >> Ptr (rem lossen). In dit geval wordt het motorasvermogen, kW, uitgedrukt door de formule

Bij het neerlaten van lichte lasten of een lege haak kunnen er gevallen zijn waarin Pgr < Ptr.In dit geval werkt de motor met een bewegingsmoment (krachtdaling) en ontwikkelt vermogen, kW,

Aan de hand van de gegeven formules is het mogelijk om het vermogen van de kraanmotor bij elke last op de haak te bepalen. Houd er bij het berekenen rekening mee dat de efficiëntie van het mechanisme afhangt van de belasting (fig. 1).
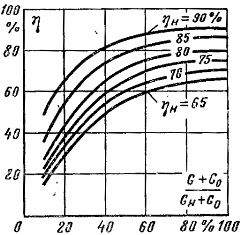
Rijst. 1. Afhankelijkheid van de efficiëntie van het mechanisme van de belasting.
Het vermogen en koppel op de as van de motoren van de horizontale mechanismen van de beweging van de kraan in de statische bedrijfsmodus kan worden bepaald door de formules

waarbij P het motorasvermogen is van het kraanbewegingsmechanisme, kW; M is het motorasmoment van het bewegingsmechanisme, Nm; G — gewicht van vervoerde vracht, N; G1 — eigen gewicht van het bewegingsmechanisme, N; v — bewegingssnelheid, m / s; R is de straal van het wiel, m; r is de straal van de nek van de wielas, m; μ — wrijvingscoëfficiënt (μ = 0,08-0,12); f — rolwrijvingscoëfficiënt, m (f = 0,0005 — 0,001 m); η — efficiëntie van het bewegingsmechanisme; k — coëfficiënt die verantwoordelijk is voor de wrijving van de wielflenzen op de spoorstaven; i - overbrengingsverhouding van het onderstelreductiemiddel.
Bij een aantal hef- en transportmechanismen vindt de beweging niet in horizontale richting plaats. Het effect van windbelasting etc. is ook mogelijk. De formule voor het bepalen van het vermogen kan in dit geval worden weergegeven als

Bovendien gemarkeerd: α — de hellingshoek van de geleiders ten opzichte van het horizontale vlak; F — specifieke windbelasting, N / m2; S is het gebied waarop de winddruk werkt onder een hoek van 90 °, m2.
In de laatste formule karakteriseert de eerste term het motorasvermogen dat nodig is om wrijving tijdens horizontale beweging te overwinnen; de tweede term komt overeen met de liftkracht, de derde is de vermogenscomponent van de windbelasting.
Een aantal kranen heeft een draaiplateau waarop het werkmaterieel staat. De beweging van het platform wordt overgebracht via een tandwiel (draaitafel) met daarop een diameter Dkp gemonteerd. Tussen het platform en de vaste basis bevinden zich rollen (rollers) met een diameter van dp. In dit geval worden het vermogen en het koppel van de kraanmotor als gevolg van wrijvingskrachten op dezelfde manier gevonden als in het geval van een heen en weer gaande beweging, namelijk:

Hier, naast de bekende waarden: G2 is het gewicht van de draaitafel met alle apparatuur erop, N; ωl — hoeksnelheid, platforms, rad/sec; in - overbrengingsverhouding van de versnellingsbak met zwenkmechanisme en het aandrijftandwiel van de transmissie - draaitafel.

Bij het bepalen van het vermogen van de elektrische aandrijving van de kraan moet in sommige gevallen rekening worden gehouden met de verandering in belasting bij het werken op een helling. De windbelasting op de draaimechanismen wordt bepaald door rekening te houden met het verschil in windkrachten die inwerken op de last, de kraangiek en het contragewicht.
Bij het ontwerpen van elektrische aandrijvingen voor kraanmechanismen wordt aan het einde van de motorselectie de elektrische aandrijving gecontroleerd op toegestane versnellingswaarden, waarvan de gegevens in tabel 1 staan vermeld
Tabel 1 Naam van de mechanismen en hun doel
De naam van de mechanismen en hun doel Versnelling, m / s2 Hefmechanismen bedoeld voor het heffen van vloeibare metalen, breekbare voorwerpen, producten, verschillende assemblagewerken 0,1 Hefmechanismen van assemblageparken en metallurgische werkplaatsen 0,2 - 0,5 Hefmechanismen van grijpkranen 0,8 Mechanismen voor beweging van kranen bestemd voor precisiemontagewerk en transport van vloeibare metalen, breekbare voorwerpen 0,1 - 0,2 Bewegingsmechanismen met volledige aantrekkingskracht van de zwaartekracht 0,2 - 0,7 Full Grip Kraanwagens 0,8 — 1,4 Kraanwartels 0,5 — 1,2