Verwarming en koeling van elektromotoren
 Een juiste bepaling van het vermogen van elektromotoren voor diverse metaalsnijmachines, mechanismen en machines is van groot belang. Met onvoldoende vermogen is het onmogelijk om de productiemogelijkheden van de machine volledig te gebruiken om het geplande technologische proces uit te voeren. Als het vermogen onvoldoende is, valt de elektromotor voortijdig uit.
Een juiste bepaling van het vermogen van elektromotoren voor diverse metaalsnijmachines, mechanismen en machines is van groot belang. Met onvoldoende vermogen is het onmogelijk om de productiemogelijkheden van de machine volledig te gebruiken om het geplande technologische proces uit te voeren. Als het vermogen onvoldoende is, valt de elektromotor voortijdig uit.
Het overschatten van het vermogen van de elektromotor leidt tot een systematische onderbelasting en als gevolg daarvan een onvolledig gebruik van de motor, een lage efficiëntie en een kleine vermogensfactor (voor asynchrone motoren). Wanneer het motorvermogen wordt overschat, stijgen ook de kapitaal- en bedrijfskosten.
Het vermogen dat nodig is om de machine te laten werken, en dus het vermogen dat door de elektromotor wordt ontwikkeld, verandert tijdens de werking van de machine. De belasting van een elektromotor kan worden gekarakteriseerd door de belastingsgrafiek (figuur 1), die de afhankelijkheid is van het vermogen van de motoras, het koppel of de stroom in de tijd.Nadat het werkstuk is verwerkt, wordt de machine gestopt, wordt het werkstuk gemeten en wordt het werkstuk vervangen. Het laadschema wordt dan nog een keer herhaald (bij het verwerken van onderdelen van hetzelfde type).
Om een normale werking onder een dergelijke variabele belasting te garanderen, moet de elektromotor tijdens de verwerking het hoogst vereiste vermogen ontwikkelen en niet oververhit raken tijdens continu gebruik in overeenstemming met dit belastingsschema. De toelaatbare overbelasting van elektromotoren wordt bepaald door hun elektrische eigenschappen.
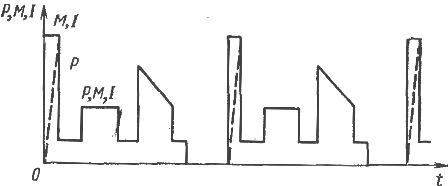
Rijst. 1. Laad het schema bij het bewerken van hetzelfde type onderdelen
Als de motor draait, energie (en vermogen) verliezenwaardoor het opwarmt. Een deel van de energie die door de elektromotor wordt verbruikt, wordt besteed aan het verwarmen van de wikkelingen, aan het verwarmen van het magnetische circuit van hysterese en wervelstromen die wrijving en luchtwrijving dragen. De warmteverliezen van de wikkelingen, evenredig met het kwadraat van de stroom, worden variabel genoemd (ΔРtrans)\u200b De resterende verliezen in de motor hangen een beetje af van de belasting en worden conventioneel constanten genoemd (ΔРpos).
De toegestane verwarming van een elektromotor wordt bepaald door de minst hittebestendige materialen van zijn constructie. Dit materiaal is de isolatie van de spoel.
Het volgende wordt gebruikt om elektrische machines te isoleren:
• stoffen van katoen en zijde, garens, papier en vezelige organische materialen die niet zijn geïmpregneerd met isolerende verbindingen (hittebestendigheidsklasse U);
• dezelfde materialen, geïmpregneerd (klasse A);
• synthetische organische films (klasse E);
• materialen van asbest, mica, glasvezel met organische bindmiddelen (klasse B);
• idem, maar dan met synthetische bindmiddelen en impregneermiddelen (klasse F);
• dezelfde materialen, maar met siliconen bindmiddelen en impregneermiddelen (klasse H);
• mica, keramiek, glas, kwarts zonder bindmiddelen of met anorganische bindmiddelen (klasse C).
Isolatieklassen U, A, E, B, F, H laten respectievelijk maximale temperaturen toe van 90, 105, 120, 130, 155, 180°C. De grenstemperatuur van klasse C is hoger dan 180°C en wordt begrensd door de eigenschappen van de gebruikte materialen.
Met dezelfde belasting van de elektromotor zal de verwarming ongelijkmatig zijn bij verschillende omgevingstemperaturen. De ontwerptemperatuur t0 van de omgeving is 40 ° C. Bij deze temperatuur worden de nominale vermogenswaarden van de elektromotoren bepaald.Het stijgen van de temperatuur van de elektromotor boven de omgevingstemperatuur wordt oververhitting genoemd:

Het gebruik van synthetische isolatie breidt zich uit. Silicium-siliciumisolaties zorgen met name voor een hoge betrouwbaarheid van elektrische machines bij gebruik in tropische omstandigheden.
De warmte die in verschillende delen van de motor wordt gegenereerd, beïnvloedt de opwarming van de isolatie in verschillende mate. Bovendien vindt er warmte-uitwisseling plaats tussen de afzonderlijke onderdelen van de elektromotor, waarvan de aard verandert afhankelijk van de belastingsomstandigheden.
De verschillende verwarming van de afzonderlijke onderdelen van de elektromotor en de warmteoverdracht daartussen bemoeilijken de analytische studie van het proces. Daarom wordt voor de eenvoud voorwaardelijk aangenomen dat de elektromotor een thermisch homogeen en oneindig warmtegeleidend lichaam is. Algemeen wordt aangenomen dat de warmte die door een elektromotor aan de omgeving wordt afgegeven, evenredig is met oververhitting.In dit geval wordt warmtestraling verwaarloosd omdat de absolute verwarmingstemperaturen van de motoren laag zijn. Beschouw het verwarmingsproces van de elektromotor onder de gegeven aannames.
Bij het werken in de elektromotor komt de warmte dq gedurende de tijd dt vrij. Een deel van deze warmte dq1 wordt opgenomen door de massa van de elektromotor, waardoor de temperatuur t en oververhitting τ van de motor toenemen. De resterende warmte dq2 wordt door de motor afgegeven aan de omgeving. Zo kan de gelijkheid worden geschreven
Naarmate de motortemperatuur stijgt, neemt de warmte dq2 toe. Bij een bepaalde waarde van oververhitting zal er net zoveel warmte aan de omgeving worden afgegeven als er in de elektromotor vrijkomt; dan dq = dq2 en dq1 = 0. De temperatuur van de elektromotor stopt met stijgen en de oververhitting bereikt een stationaire waarde van τу.
Onder de bovenstaande aannames kan de vergelijking als volgt worden geschreven:

waarbij Q het thermisch vermogen is als gevolg van verliezen in de elektromotor, J / s; A - warmteoverdracht van de motor, d.w.z. de hoeveelheid warmte die de motor per tijdseenheid aan de omgeving afgeeft bij een temperatuurverschil tussen de motor en de omgeving van 1oC, J / s-deg; C is de thermische capaciteit van de motor, d.w.z. de hoeveelheid warmte die nodig is om de temperatuur van de motor met 1 ° C te verhogen, J / deg.
We hebben de variabelen in de vergelijking gescheiden
We integreren de linkerkant van de gelijkheid in het bereik van nul tot een bepaalde huidige waarde van tijd t en de rechterkant in het bereik van de initiële oververhitting τ0 van de elektromotor tot de huidige waarde van oververhitting τ:
Als we de vergelijking voor τ oplossen, krijgen we een vergelijking voor het verwarmen van een elektromotor:
Laten we C / A = T aanduiden en de dimensie van deze verhouding bepalen:

Rijst. 2. Curven die kenmerkend zijn voor de opwarming van de elektromotor
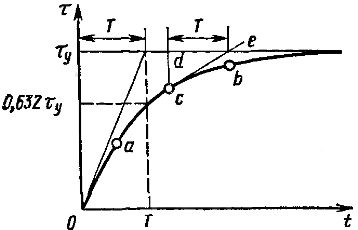
Rijst. 3. Bepaling van de verwarmingstijdconstante
Het wordt de grootheid T genoemd, die de dimensie heeft van tijd verwarmingstijd constante elektrische motor. In overeenstemming met deze notatie kan de verwarmingsvergelijking worden herschreven als
Zoals je kunt zien aan de hand van de vergelijking, krijgen we een stationaire oververhittingswaarde.
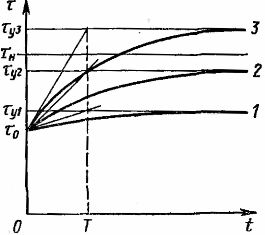
Wanneer de belasting van de elektromotor verandert, verandert de hoeveelheid verliezen en dus de waarde van Q. Dit leidt tot een verandering in de waarde van τу.
In afb. 2 toont de stooklijnen 1, 2, 3 die overeenkomen met de laatste vergelijking voor verschillende belastingswaarden. Wanneer τу de waarde van de toegestane oververhitting τn overschrijdt, is de continue werking van de elektromotor onaanvaardbaar. Zoals volgt uit de vergelijking en grafieken (fig. 2), is de toename van oververhitting asymptotisch.
Als we de waarde t = 3T in de vergelijking invullen, krijgen we een waarde van τ die ongeveer slechts 5% kleiner is dan τy. Gedurende de tijd t = 3T kan het verwarmingsproces dus praktisch als voltooid worden beschouwd.
Als je op enig punt met de stooklijn (fig. 3) een raaklijn tekent aan de stooklijn, trek dan een verticaal door hetzelfde punt, dan het segment de van de asymptoot, gesloten tussen de raaklijn en de verticaal, op de schaal van de abscis-as is gelijk aan T. Als we Q = 0 in de vergelijking nemen, krijgen we de motorkoelingsvergelijking:

De koelcurve getoond in Fig. 4, komt overeen met deze vergelijking.
De tijdconstante van verwarming wordt bepaald door de grootte van de elektromotor en de vorm van bescherming tegen omgevingsinvloeden. Voor open en beschermde elektromotoren met laag vermogen is de opwarmtijd 20-30 minuten. Voor gesloten elektrische motoren met hoog vermogen bereikt deze 2-3 uur.
Zoals hierboven vermeld, is de vermelde theorie van elektrische motorverwarming bij benadering en gebaseerd op ruwe aannames. Daarom verschilt de experimenteel gemeten verwarmingscurve aanzienlijk van de theoretische. Als voor verschillende punten van de experimentele stooklijn de constructie getoond in Fig. 3 blijkt dat de waarden van T toenemen met toenemende tijd. Daarom moeten alle berekeningen die volgens de vergelijking zijn gemaakt, als bij benadering worden beschouwd. Bij deze berekeningen is het raadzaam om de constante T grafisch bepaald voor het startpunt van de stooklijn te gebruiken. Deze waarde van T is de kleinste en geeft bij gebruik een zekere marge aan motorvermogen.
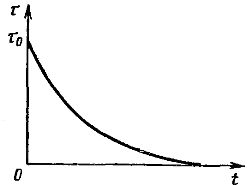
Rijst. 4. Motorkoelcurve
De experimenteel gemeten koelcurve wijkt nog meer af van de theoretische dan de verwarmingscurve. De koeltijdconstante die overeenkomt met de motor uit is aanzienlijk langer dan de verwarmingstijdconstante vanwege verminderde warmteoverdracht bij afwezigheid van ventilatie.