Mechanische kenmerken van elektromotoren en productiemechanismen
 Bij het ontwerpen van een elektrische aandrijving moet de elektromotor zo worden gekozen dat de mechanische kenmerken overeenkomen met de mechanische kenmerken van het productiemechanisme. De mechanische kenmerken geven de relatie van de variabelen in de stabiele toestand.
Bij het ontwerpen van een elektrische aandrijving moet de elektromotor zo worden gekozen dat de mechanische kenmerken overeenkomen met de mechanische kenmerken van het productiemechanisme. De mechanische kenmerken geven de relatie van de variabelen in de stabiele toestand.
Een mechanisch kenmerk van het mechanisme wordt de relatie genoemd tussen de hoeksnelheid en het weerstandsmoment van het mechanisme, gereduceerd tot de motoras) ω = f (Mc).
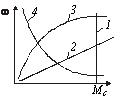
Rijst. 1. Mechanische kenmerken van mechanismen
Onder alle variëteiten zijn er verschillende karakteristieke soorten mechanische kenmerken van de mechanismen:
1. Karakteristiek met een snelheidsonafhankelijk weerstandsmoment (rechte lijn 1 in Fig. 1). De snelheidsonafhankelijke mechanische karakteristiek wordt getekend als een rechte lijn evenwijdig aan de rotatieas, in dit geval verticaal. Een dergelijke eigenschap is bijvoorbeeld aanwezig bij kranen, lieren, zuigerpompen met een constante opvoerhoogte, enz.
2.Een karakteristiek met een weerstandsmoment lineair afhankelijk van de snelheid (rij 2 in Fig. 1). Deze afhankelijkheid is bijvoorbeeld inherent aan de aandrijving van een onafhankelijk bekrachtigde gelijkstroomgenerator die onder constante belasting werkt.
3. Karakteristiek met een niet-lineaire toename van het koppel (curve 3 in Fig. 1). Typische voorbeelden zijn de werking van ventilatoren, centrifugaalpompen, propellers. Voor deze mechanismen hangt het moment Mc af van het kwadraat van de hoeksnelheid ω... Dit is de zgn. parabolische (ventilator) mechanische karakteristiek.
4. Karakteristiek met niet-lineair afnemend weerstandsmoment (curve 4 in Fig. 1). Hier is het sleepmoment omgekeerd evenredig met de rotatiesnelheid. In dit geval blijft het vermogen constant over het gehele werksnelheidsbereik van het mechanisme. In de mechanismen van de hoofdbeweging van sommige metaalsnijmachines (draaien, frezen, boren) verandert het moment Mc bijvoorbeeld omgekeerd evenredig met ω en blijft het door het mechanisme verbruikte vermogen constant.
Mechanische kenmerken van de elektromotor worden de afhankelijkheid van zijn hoeksnelheid van het koppel ωd = f (M) genoemd. Hierbij moet in gedachten worden gehouden dat het moment M op de motoras, ongeacht de draairichting, een positief teken heeft - het moment van beweging. Tegelijkertijd heeft het weerstandsmoment Mc een negatief teken.
Als voorbeelden zijn Fig. 2 toont de mechanische kenmerken: 1 — synchrone motor; 2 — DC-motor met onafhankelijke bekrachtiging; 3 — DC-motor met seriebekrachtiging.
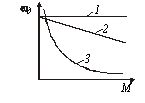 Rijst. 2. Mechanische eigenschappen van elektromotoren
Rijst. 2. Mechanische eigenschappen van elektromotoren
Om de eigenschappen van de mechanische eigenschappen van een elektrische aandrijving te evalueren, wordt het concept van karakteristieke stijfheid gebruikt.De stijfheid van de mechanische eigenschap wordt bepaald door de uitdrukking
β = dM / dω
waarin dM — verandering in motorkoppel; dωd — de overeenkomstige verandering in hoeksnelheid.
Voor lineaire karakteristieken blijft de waarde β constant, voor niet-lineaire is deze afhankelijk van het werkpunt.
Gebruikmakend van dit concept, worden de functies getoond in Fig. 2, kan kwalitatief als volgt worden geëvalueerd: 1 — absoluut rigide (β = ∞); 2 — vast; 3 — zacht.
Een absoluut moeilijke eigenschap: het toerental van de motor blijft ongewijzigd wanneer de motorbelasting van nul naar nominaal verandert. Synchrone motoren hebben deze eigenschap.
Stijve eigenschap - de rotatiesnelheid verandert weinig wanneer de belasting verandert van nul naar nominaal. Deze karakteristiek is zowel aanwezig bij een parallel bekrachtigde gelijkstroommotor als bij een inductiemotor in het gebied van het lineaire deel van de karakteristiek.
Een rigide karakteristiek wordt beschouwd als een karakteristiek waarbij de snelheidsverandering niet groter is dan ongeveer 10% van de nominale snelheid wanneer de belasting wordt gewijzigd van nul naar nominaal.
Zachte karakteristiek — het motortoerental verandert aanzienlijk bij relatief kleine belastingsveranderingen. Deze eigenschap heeft een gelijkstroommotor met serie-, gemengde of parallelle excitatie, maar met extra weerstand in het ankercircuit, evenals asynchroon met weerstand in het rotorcircuit.
Voor de meeste productiemechanismen worden asynchrone kooiankermotoren gebruikt, die stijve mechanische eigenschappen hebben.
Alle mechanische kenmerken van elektromotoren zijn onderverdeeld in natuurlijk en kunstmatig.
Natuurlijke mechanische kenmerken verwijzen naar de bedrijfsomstandigheden van de motor met de nominale waarden van de parameters.
Voor een parallel opgewekte motor kan bijvoorbeeld de natuurlijke karakteristiek worden uitgezet voor het geval dat de ankerspanning en bekrachtigingsstroom nominale waarden hebben en er geen extra weerstand is in het ankercircuit.
Het natuurlijke kenmerk van een inductiemotor komt overeen met de nominale spanning en nominale frequentie van de wisselstroom die wordt geleverd aan de motorstator, op voorwaarde dat er geen extra weerstand is in het rotorcircuit.
Zo kan voor elke motor slechts één natuurlijk kenmerk worden gebouwd en een onbeperkt aantal kunstmatige. Elke nieuwe waarde van de ankerweerstand van een gelijkstroommotor of in het rotorcircuit van een inductiemotor heeft bijvoorbeeld zijn eigen mechanische kenmerken.
