Encoders - Roterende hoeksensoren
 Positionering in verschillende soorten industriële apparatuur wordt geleverd met behulp van eenvoudig ogende apparaten - encoders (of met andere woorden, hoeksensoren).
Positionering in verschillende soorten industriële apparatuur wordt geleverd met behulp van eenvoudig ogende apparaten - encoders (of met andere woorden, hoeksensoren).
Encoders worden gebruikt om lineaire of roterende bewegingen om te zetten in een binair digitaal signaal. Een encoder is een apparaat waarvan de as is verbonden met de roterende as van het object dat wordt bestudeerd en zorgt voor elektronische controle van de rotatiehoek van dit object. Volgens het werkingsprincipe zijn encoders onderverdeeld in optisch en magnetisch.
Op de as van de optische encoder bevindt zich een schijf met intermitterende vensters rond de omtrek, waartegen zich een LED en een fototransistor bevinden, die zorgen voor de vorming van een uitgangssignaal in de vorm rechthoekige pulstreinen met een frequentie die evenredig is met zowel het aantal vensters als de rotatiesnelheid van de schijf / as. Het aantal pulsen geeft de draaihoek aan.
Optische encoders zijn verkrijgbaar als incrementele en absolute encoders.
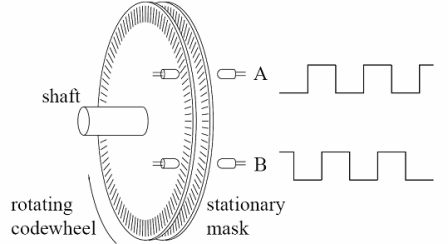
Incrementele encoders hebben een intermitterende schijf met veel vensters van dezelfde grootte als de basisradius en twee aflezingen optocouplers, waarmee u zowel de draaihoek als de draairichting van de as kunt vastleggen.Op de extra straal van de schijf bevindt zich een enkel breekvenster en een overeenkomstige optocoupler die de startpositie (thuis) bepalen.
Negatief koppel - Incrementele encoders geven een relatieve uitlezing van de rotatiehoek, waarvan de informatie niet wordt opgeslagen wanneer de rotatie wordt gestopt. Hun voordelen zijn onder meer eenvoud van ontwerp (en dus lage kosten) bij een hoge resolutie en een hoge werkfrequentie.
Incrementele encoders met verhoogde duurzaamheid zijn gericht op industriële toepassingen - in machinebouw, walserijen, scheepsbouw, textiel, schoenen, houtbewerking. Voor dergelijke encoders zijn de doorslaggevende parameters de resolutie in de draaihoek, het vermogen om met hoge frequenties te werken, een hoge mate van bescherming om de omstandigheden van de barre omgeving te weerstaan.
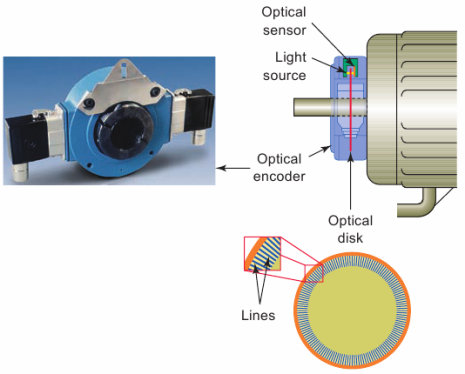
Een schijf met lijnen of inkepingen die de lichtstraal naar de optische sensor onderbreken. Een elektronisch circuit detecteert de straalonderbrekingen en genereert digitale uitgangspulsen van de encoder.
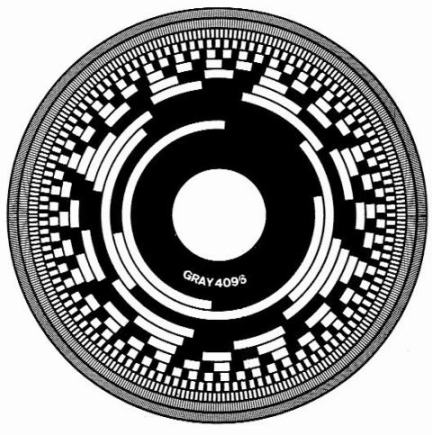
Coderingsschijf - een apparaat voor het omzetten van de hoekverplaatsingen van de as in digitale vorm. Een geometrisch beeld van een digitale code wordt aangebracht op de coderingsschijf. De codebitsymbolen worden aangebracht op een concentrisch spoor en de minst significante (minder significante) bits bevinden zich dichter bij de periferie.
Afhankelijk van de methode om de code te lezen (contact, foto-elektrisch, elektromagnetisch, inductie, elektrostatisch, enz.), bestaat het geometrische beeld van de code uit elektrisch geleidend en elektrisch geïsoleerd, transparant en ondoorzichtig, magnetisch en niet-magnetisch, enz.
De meest voorkomende waren coderingsschijven met verschillende soorten binaire code, die het optreden van fouten uitsluiten bij het overschrijden van de grenzen van afzonderlijke afzonderlijke secties, wanneer sommige bits aan de ene kant van de grens kunnen worden gelezen en andere aan de andere (vanwege onnauwkeurige installatie van verwisselbare apparaten of door een niet-gelijktijdige leescode terwijl de schijf draait. Deze codes omvatten de zogenaamde Fau-code (Barker-code) en Reflex-code (Grijze code).
Sommige optische roterende encoders gebruiken een reflecterende encoderschijf. Deze schijf heeft afwisselende secties die licht absorberen of reflecteren, en de lichtbron en de ontvanger bevinden zich aan één kant van de schijf. Als er slechts één lichtbron en ontvanger is, kunt u met de reeks pulsen van de sensor achterhalen hoeveel stappen de schijf heeft gedraaid ten opzichte van de vorige positie.
Een sensor kan de draairichting niet bepalen, maar als je een tweede bron-naar-ontvanger-paar toevoegt, 90 uit fase ten opzichte van het eerste, dan kan de microcontroller de draairichting van de schijf bepalen aan de hand van het faseverschil tussen de pulstreinen.
Houd er rekening mee dat elk systeem dat de relatieve rotatie van de schijf detecteert maar de absolute hoekpositie niet kan meten, een incrementele encoder is.
Een absolute encoder heeft een discontinue schijf met concentrische vensters met verschillende stralen waarvan de relatieve afmetingen worden bepaald door de binaire code en die gelijktijdig worden gelezen, waardoor een gecodeerd uitgangssignaal wordt gegeven voor elke hoekpositie (grijze code, binaire code...).
In dit geval is het mogelijk om gegevens te verkrijgen over de momentane positie van de as zonder een digitale teller of om terug te keren naar de beginpositie, aangezien de uitvoer een gecodeerd woord heeft - «n bit», beschermd tegen elektrische ruis.
Absolute encoders worden gebruikt in toepassingen die lange opslag van invoergegevens vereisen, maar ze zijn complexer qua ontwerp en duurder.
Absolute encoders met veldbusinterface hebben een uitgangsinterface voor veldbuscommunicatie volgens CANopen-, ProfiBus-, DeviceNet-, Ethernet-, InterBus-standaarden en gebruiken een binaire code om de draaihoek te bepalen. Bovenstaande communicatie-interfaces zijn programmeerbaar volgens een aantal parameters: bv. draairichting, pulsresolutie per omwenteling, baudrate.

Encoders die op de motoras zijn gemonteerd, zorgen effectief voor nauwkeurige positionering. Dergelijke encoders worden meestal geproduceerd in de "gat"-versie en speciale koppelingen zijn belangrijke elementen van hun ontwerp, die het mogelijk maken om de speling van de motoras te compenseren.
Positionering onder de bovenstaande omstandigheden biedt het meest effectief een magnetische encoder, waarbij de omzetting van de hoekverplaatsing van de as in een elektronisch signaal contactloos wordt uitgevoerd op basis van het Hall-effect, is niet gerelateerd aan de rotatie van de optische chopper binnenin de sensor en maakt signaalverwerking mogelijk met snelheden tot 60.000 tpm.
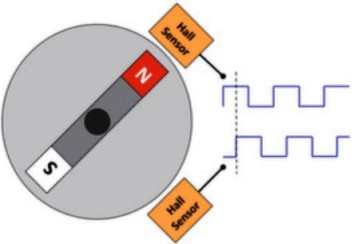
In een magnetische encoder wordt de snelle rotatie van een externe as, waarop een permanente cilindrische magneet is bevestigd, gedetecteerd door een Hall-sensor gecombineerd op een enkel halfgeleiderkristal met een signaalverwerkingscontroller.
Wanneer de polen van de permanente magneet over de microschakeling draaien Hall-sensor de variabele magnetische inductievector induceert de Hall-spanning, die informatie bevat over de momentane waarde van de asrotatiehoek. De microcontroller zorgt voor een snelle conversie van de Hall-spanning naar de positioneringshoekparameter.

De mogelijkheid van een dergelijke conversie zonder directe mechanische verbinding van de magneet en Hall-sensorelementen is het belangrijkste voordeel van magnetische encoders, biedt ze een hoge betrouwbaarheid en duurzaamheid en stelt ze in staat efficiënt te werken in toepassingen met hoge snelheid die verband houden met industriële automatisering, printen, metaalbewerking , meet- en meetapparatuur.