Elektrische uitrusting van liften
 Een lift is een cyclische hefmachine die is ontworpen voor het verticaal tillen van mensen en goederen. Op afspraak zijn de liften verdeeld in passagier, vrachtpassagier, ziekenhuis, vracht.
Een lift is een cyclische hefmachine die is ontworpen voor het verticaal tillen van mensen en goederen. Op afspraak zijn de liften verdeeld in passagier, vrachtpassagier, ziekenhuis, vracht.
Afhankelijk van de snelheid van de kooi zijn liften onderverdeeld in lage snelheid (tot 0,71 m / sec), hoge snelheid (van 1 tot 1,6 m / sec), hoge snelheid (van 2 tot 4 m / sec) en hoge snelheid (4 - 10 m / s) ... Het laadvermogen van passagiersliften is van 320 tot 1600 kg, goederenliften - van 160-5000 kg. Bij een snelheid tot 1,6 m / sec is de elektromotor via een versnellingsbak verbonden met de trekbalk, als de snelheid hoger is, worden tandwielloze elektrische aandrijvingen gebruikt.

Met een grote verscheidenheid aan ontwerpopties voor personen- en goederenliften, zijn de belangrijkste apparaten daarvoor takels, touwen, kooien, contragewichten, mechanische remmen en bedieningsapparatuur. Moderne liften hebben een contragewichtophangsysteem en een contragewichtkabel.

De cabine beweegt langs verticale rails.De cabine hangt aan de touwen die de sleepkabel omringen en de katrollen van de elektrische lieraandrijving geleiden. Aan de uiteinden van het touw bevindt zich een contragewicht dat langs de geleiders beweegt. De massa van het contragewicht is gelijk aan de som van de cabinemassa en (0,42 — 0,5) de massa van de lading (of de helft van de meest waarschijnlijke cabinebelasting).
Lift rijdt
In liften en goederenliften worden de soorten elektrische aandrijvingen gekozen afhankelijk van de bewegingssnelheid, het aantal verdiepingen van het gebouw en de vereiste remnauwkeurigheid. De volgende elektrische aandrijvingen zijn momenteel in gebruik:
a) voor gebouwen tot 17 verdiepingen worden langzame en hogesnelheidsliften met een snelheid van 0,7 tot 1,4 m / s met een laadvermogen van 320.400 kg gebruikt. Deze liften maken gebruik van een elektrische aandrijving met een asynchrone elektromotor met twee snelheden met een rotor in een eekhoornkooi,
b) voor hogesnelheidspassagiersliften met een snelheid van 1,6 m / s, bedoeld voor gebouwen tot 25 verdiepingen, een elektrische aandrijving volgens het thyristor-spanningsregelsysteem (TRN) met een asynchrone motor met twee snelheden (TRN-ADD ) is gebruikt.

De aanwezigheid van een instelbare elektrische aandrijving zorgt voor een hoge soepelheid van versnellings- en vertragingsprocessen, een hoge nauwkeurigheid van het stoppen op de vloer (tot 20 mm) en de afwezigheid van een sectie met verminderde snelheid voordat wordt gestopt. De tweede wikkeling van de motor wordt gebruikt om tijdens revisie een lage snelheid te bereiken,
c) voor snelle en snelle liften worden constante elektrische aandrijvingen gebruikt volgens het motorsysteem van thyristoromvormer-TP-D en wisselstroom volgens het systeem van frequentieomvormer-kortsluiting asynchrone elektromotor GGCH-AD.
Thyristor elektrische aandrijving van lift type ULMP-25-16
De voeding van de elektrische aandrijving (Fig. 1) wordt uitgevoerd door een omkeerbare thyristor-spanningsregelaar UZ (TRN) bij het opstarten en gelijkmatige beweging en door een afzonderlijke gelijkrichter die is samengesteld volgens een enkelfasig brugcircuit UZ1 voor het voeden van de statorwikkeling tijdens dynamisch remmen.
Het systeem biedt parametrische faseregeling van de rotatiesnelheid van een kooianker-inductiemotor. Het automatische besturingssysteem is gemaakt op een microcomputer met één chip van het type KR1816VB031, die een directe digitale regeling van de rotatiesnelheid van een asynchrone elektromotor met twee snelheden uitvoert.
Het automatische regelsysteem zorgt voor een hoge nauwkeurigheid bij het handhaven van de ingestelde snelheid en het stoppen op het niveau van de vereiste vloer direct naar het instelpunt zonder een sectie met verminderde snelheid. De tweede wikkeling van de motor wordt alleen ingeschakeld tijdens revisie.
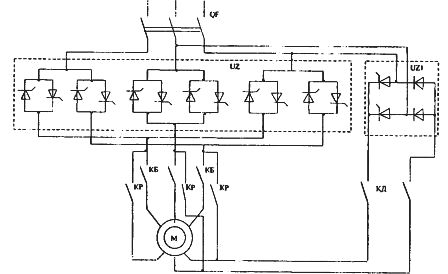
Rijst. 1. Schema van de thyristor elektrische aandrijving van de lift
Rem solenoïdes
Hefmechanismen van liften zijn uitgerust met speciale reminrichtingen met elektromagneten met korte slag en korte slag gelijkstroom, die via een gelijkrichter op een 220 of 380 V-netwerk zijn aangesloten.
Bedieningsapparaten voor liften
Vloerschakelaars ontworpen voor het schakelen van motion control-circuits. Ze registreren de positie van de auto, selecteren automatisch de rijrichting («omhoog» of «omlaag») en geven een commando om de elektrische aandrijving uit te schakelen bij het remmen.Structureel zijn dit driestanden (1-0-2) driepuntshendelschakelaars (bewegingsbesturingsinrichtingen) met beweegbare (op de hendel) naar vaste (op het lichaam) contacten.
De vloerschakelaars zijn op vloerniveau in de schacht gemonteerd en er is een gegoten aftakking in de cabine die inwerkt op de vloerschakelaarhendel.
Wanneer de cabine "omhoog" beweegt door aan de hendel te draaien, sluit een groep vaste contacten en "omlaag" - een andere. Als de kooi op vloerniveau staat, staat de vloerschakelaar in de neutrale stand «O» en zijn de vaste contacten open.

Snelheidsschakelaars zijn ontworpen om een impuls te geven om de snelheid te verminderen voordat het voertuig stopt. Ze worden gebruikt in hogesnelheidsliften met elektrische aandrijving met uitvoering met twee snelheden. Ze zijn gebouwd op het principe van vloerschakelaars, maar hebben een ander ontwerp. De snelheidsschakelaars worden als een complete set boven en onder de vloer op een afstand van 0,5 tot 0,6 m in de mijnschacht gemonteerd.
Hendelschakelaars zijn ontworpen om gecontroleerde goederenliften te bedienen. Structureel zijn dit hendelschakelaars met drie standen met automatische terugkeer van de hendel naar de neutrale stand ("top" -0- "bottom"), gemonteerd in de cabine. Door aan de hendel te draaien, wordt de bewegingsrichting geselecteerd, wat wordt bereikt door een paar vaste contacten te sluiten. Wanneer de hendel wordt losgelaten, gaan de contacten open en stopt de motor (gaat uit). De schakelaars worden gelijktijdig gebruikt als eindschakelaar in de eindstanden van de cabine. Dit wordt bereikt door de werking van de hendel op de rol van speciale geleiders in de schacht van de mijn.
Inductieve sensoren ontworpen voor gebruik in hogesnelheidsliften. Het diagram van dergelijke sensoren voor wisselstroom en gelijkgerichte stroom wordt getoond in Fig. 2.
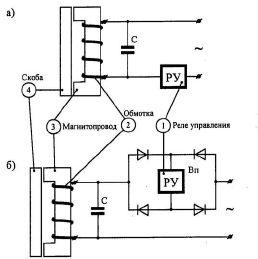
Rijst. 2. Schematisch diagram van afwisselende (a) en gelijkgerichte (b) huidige inductieve sensoren
In de mijnschacht is een U-vormig gelamineerd magnetisch circuit van staal 3 geïnstalleerd en op de cabine bevindt zich een stalen beugel 4, een magnetische shunt. Op het magnetische circuit bevindt zich een spoel met wikkeling 2, waarop stuurrelais 1 rechtstreeks of via een Vp-gelijkrichter is aangesloten. Wanneer de klem weggaat (het magnetische circuit opent), is de inductieve weerstand van de spoel klein, wat de werking van het stuurrelais garandeert. Als de stalen beugel het magnetische circuit overlapt, stijgt de inductieve weerstand van de spoel sterk en valt het relais af.
De betrouwbaarheid en duidelijkheid van de werking van het stuurrelais wordt verzekerd door de opname van capaciteit C parallel aan de spoel, die wordt gekozen uit de voorwaarde van het verkrijgen van een modus die dicht bij de resonantie van stromen ligt. Het gebruik van een gelijkrichter om het stuurrelais van stroom te voorzien, verhoogt de betrouwbaarheid van de werking van het magnetische systeem van het relais.
Bovendien worden hermetische contactapparaten (reed-schakelaars) veel gebruikt in rijsensoren. Het gebruik van inductieve sensoren elimineert dergelijke nadelen van vloerschakelaars en snelheidsschakelaars zoals ruis en radiostoring die voortkomen uit de werking van contactapparaten.
Magnetische gelaagdheid is een elektromagnetisch apparaat dat in de cabine is geïnstalleerd en de werking van de mijndeursloten regelt. De magnetische aftakbegrenzer is verbonden met het anker van de aftakelektromagneet.Wanneer de cabine op de vloer staat, wordt de aftakkingselektromagneet ontlucht, de veerbelaste pal ontkoppelt de vergrendeling van de mijndeur, waardoor deze kan worden geopend.
Tijdens het bewegen wordt de elektromagneet van de tak bekrachtigd - de grendel wordt geïntroduceerd, waardoor het openen van de deur onmogelijk wordt. Dergelijke sloten worden gebruikt in liften van oud ontwerp (of gemoderniseerd) met handmatige schachtdeurbediening.

Automatisering van liften
Het belangrijkste verschil tussen de werking van liften en takels is hun positie met meerdere posities, wat tot uiting komt in het feit dat de mechanismen een groot aantal vaste posities kunnen innemen. Daarom is het na elke stop noodzakelijk om het logische probleem van het kiezen van de volgende zet op te lossen. De oplossing voor dit probleem wordt momenteel geïmplementeerd met behulp van logische chips en microprocessors. De volgende taken zijn ingesteld voor het liftbesturingsschema: controle van de positie van de kooi in de schacht, automatische selectie van de bewegingsrichting, bepaling van de starttijd van de stop, nauwkeurig stoppen van de kooi op de vloer, automatisch openen en sluiten van deuren en beveiliging van elektrische aandrijvingen en lift.
De commandosignalen die het bewegingsprogramma van de auto instellen, zijn onderverdeeld in twee typen: "bevelen" die uit de auto komen en "oproepen" die van het landingsplatform komen. Commando's worden gegeven via knoppen in respectievelijk de cockpit en de vloer. Afhankelijk van de reactie op commando's en de methoden voor hun verwerking, verschillen afzonderlijke en collectieve besturingsschema's.Met een afzonderlijk besturingsprincipe neemt het circuit slechts één commando waar en voert het uit en reageert tijdens de uitvoering niet op andere opdrachten en oproepen.
Dit schema is het eenvoudigst te implementeren, maar beperkt de mogelijke kenmerken van de lift en wordt daarom alleen gebruikt voor liften in woongebouwen tot negen verdiepingen hoog met een relatief kleine passagiersstroom. Met het principe van collectieve besturing ontvangt het circuit meerdere commando's tegelijk en voert deze in een bepaalde volgorde uit, meestal in de volgorde van de verdiepingen.

De basis van het liftbesturingssysteem is de vloerklokmeting. De studie van de klok kan een slinger zijn, wanneer de bevestiging in twee richtingen wordt uitgevoerd, van onder naar boven en van boven naar beneden, en in één richting, bijvoorbeeld alleen van boven naar beneden. De slingerzwaai wordt vaker gebruikt.